


Scanneurs 3D
L'une des grandes avancées dans le domaine de l'ingénierie industrielle a été le développement de la rétro-ingénierie processus. Cela consiste à extraire des informations directement d'un système physique et à les traduire en un modèle numérique.
La rétro-ingénierie offre de nombreux avantages lors de la modélisation et de la simulation d'un système ou d'un produit. D'une part, il permetd'extraire des informations directes du modèle, qui est plus fiable et de meilleure qualité, et d'autre part, il accélère et raccourcit les temps de travail. Cela permet de modéliser des systèmes complexes de manière plus fiable et en moins de temps.
L'un des domaines dans lesquels la rétro-ingénierie a été appliquée avec le plus de succès est la métrologie, avec la numérisation de géométries complexes.
Scanneurs 3D
La numérisation 3D est le processus de conversion d'une surface physique en un modèle numérique. Elle consiste à extraire la position relative de plusieurs points sur cette surface (nuage de points) et à interpoler numériquement la surface les contenant, reconstruisant ainsi la géométrie de la pièce.
Les principaux paramètres définissant ce nuage de points sont la résolution et la précision. La résolution est donnée par la distance minimale qui peut être résolue entre deux points et la précision par l'erreur dans la détermination de la position réelle de chaque point. Une résolution plus élevée permettra de capturer des détails plus petits tandis qu'une grande précision fournira des modèles avec des dimensions plus proches de la réalité et donc des tolérances plus faibles.
Les appareils conçus à cet effet sont appelés scanners 3D. Il en existe de nombreux types en fonction de leur technologie, et ils peuvent être classés en deux groupes principaux :contact et sans contact.
Contacter les scanners 3D sont probablement les moins courants, bien qu'ils soient parmi les les plus précis. Ils se composent d'un bras articulé, généralement à 6 degrés de liberté, avec un stylet à l'extrémité. L'opérateur parcourt la surface avec le stylet tandis que des capteurs enregistrent la position à une fréquence spécifique. Le principal inconvénient de cette technologie est qu'elle oblige l'opérateur à balayer toute la surface avec le stylet, ce qui peut être un processus très lent. D'autre part, le frottement du stylet sur la surface peut endommager la surface, ce qui peut être problématique avec des artefacts archéologiques ou des œuvres d'art.

Image 1 :Scanner 3D avec contact Faro. Source :Faro.com
Scanners sans contact sont basés sur des technologies optiques et se divisent en deux catégories :les systèmes passifs et les systèmes actifs.
Systèmes passifs reposent principalement sur l'extraction des informations géométriques d'une surface à partir de photographies prises à partir de deux points de vue définis, une technique connue sous le nom de stéréoscopie et basée sur l'effet de parallaxe de la vision humaine. Son principal avantage est qu'il peut cartographier de grandes surfaces rapidement et à moindre coût, mais sa résolution et sa précision sont très faibles. De plus,il ne permet pas de capturer des mesures réelles, il nécessite donc un système complémentaire qui permet de redimensionner le modèle à ses dimensions réelles.
La technologie de numérisation 3D passive la plus connue est la photogrammétrie, principalement utilisé en cartographie topographique et en génie civil. Il est généralement complété par des données de positionnement par satellite pour ajouter des données dimensionnelles précises.
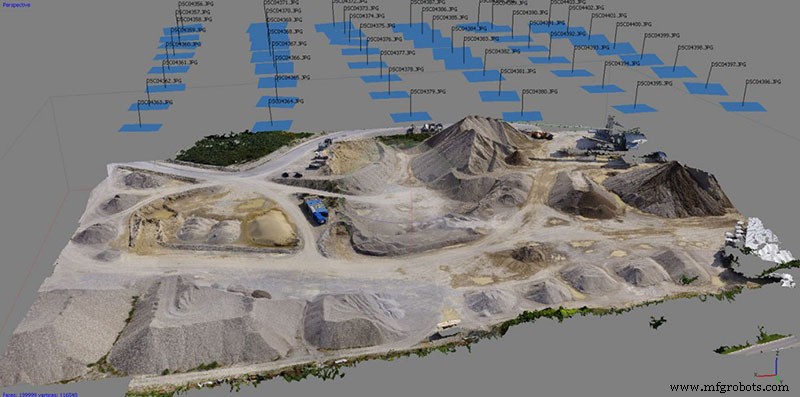
Image 2 :Modèle topographique réalisé par photogrammétrie. Source :aamspi.com
Enfin, il y a les systèmes de numérisation 3D actifs sans contact. C'est le groupe le plus important et le plus largement utilisé dans l'industrie, l'art, la médecine et le divertissement.
Ce type de système est basé sur la mesure d'un signal émis en surface. Bien que tout type de signal capable d'interagir avec la surface puisse être utilisé, comme les ultrasons,les systèmes les plus courants sont optiques.
Il existe plusieurs technologies dans cette catégorie, cependant, les plus courantes sont quatre : scanners 3D à temps de vol, scanners 3D à triangulation, scanners 3D à différence de phase et scanners 3D à lumière structurée.
Scanners 3D à temps de vol (Tof) :Basé sur le calcul de la distance jusqu'à la surface en mesurant le temps nécessaire à une impulsion de lumière laser pour se déplacer vers et depuis la surface. Il combine une longue portée avec une fréquence élevée d'acquisition de points. Il est principalement utilisé pour cartographier de grandes structures ou comme outil métrologique pour déterminer les déformations d'éléments structurels . De nos jours son usage non professionnel s'est banalisé grâce à son implémentation dans certains téléphones comme les iPhones grâce à son capteur lidar.
Vidéo 1 :Numérisation 3D à l'aide de la technologie Tof avec un iPhone. Source :labs.laan.com
Scanners 3D à triangulation ou laser : Ils se composent d'un émetteur laser et d'un capteur à barrette de photodiodes, positionnés selon un certain angle. Lorsque le faisceau laser est réfléchi sur la surface à cartographier, il est incident sur un certain point du capteur, en fonction de la distance à la surface. Cela permet de trianguler la position du point où le faisceau laser est incident. C'est l'un des systèmes les plus précis, cependant, cela dépend de l'angle auquel le laser est incident sur la surface, donc cela nécessite des distances de travail très courtes. Il convient à la cartographie d'objets de petite à moyenne taille avec une résolution et une précision élevées.
Vidéo 2 :Fonctionnement d'un scanner à triangulation 3D. Source :www.micro-epsilon.com
Scanners de différence de phase : Il s'agit d'une solution intermédiaire aux deux précédentes. Ils se composent d'un émetteur laser modulé et d'un détecteur, et déterminent la distance à l'objet en comparant la phase de la lumière émise et reçue. Ils ont une bonne distance de travail et une précision moyenne, ce qui les rend adaptés à la cartographie de grands objets avec une bonne précision.
Scanners à lumière structurée : Probablement le le plus courant aujourd'hui. T Ce sont les scanners 3D les plus polyvalents car ils combinent une excellente résolution, une grande précision, une vitesse d'acquisition élevée et un faible coût. Ils se composent d'une caméra avec un objectif calibré et d'un projecteur qui projette des motifs lumineux sur la surface. La caméra capture des images des déformations de ces motifs sur la surface et au moyen d'algorithmes de traitement complexes génère le nuage de points. Ce système permet d'obtenir des centaines de points à chaque capture, il a donc une vitesse d'acquisition élevée. De plus, selon l'objectif utilisé, il est possible de régler la distance de travail, la précision et la résolution. Ils ont également l'avantage que de nombreux modèles, tels que ceux de Thor3D, peuvent être utilisés à main levée, sans avoir besoin d'un trépied. Leur principal inconvénient est qu'ils sont sensibles aux conditions de lumière ambiante et à la finition de la pièce, de sorte que la numérisation 3D doit être effectuée sous un éclairage approprié et dans le cas de surfaces brillantes ou transparentes, il peut être nécessaire d'appliquer une peinture mate spéciale.
Vidéo 3 :Scanner 3D à lumière structurée Calibry. Source Thor3Dscanner.com
Traitement des nuages de points
Généralement, les systèmes de numérisation 3D ne capturent pas de données continues, mais des positions discrètes de la surface à capturer. C'est ce qu'on appelle un nuage de points. Le nuage de points obtenu par le scanner 3D ne peut pas être utilisé directement, donc plusieurs tâches de post-traitement sont nécessaires pour réaliser la réplique numérique.
La qualité finale du modèle dépendra, en plus de partir d'un nuage de points de qualité, sur son traitement correct. Cela nécessite un logiciel avec de bons algorithmes de reconstruction et une certaine connaissance du traitement des nuages de points.
Tout d'abord, dans le cas où le scan 3D a été effectué en plusieurs captures, les différents nuages de points doivent être alignés et fusionnés pour obtenir un seul nuage couvrant l'ensemble du modèle. La précision de l'alignement des nuages de points dépendra en grande partie des capacités de suivi du scanner 3D. Le suivi des marqueurs M sera toujours le plus facile à aligner, cependant, il y a des cas où les marqueurs ne peuvent pas être utilisés, comme dans le cas d'une illustration. Pour ces cas, certains scanners, tels que Calibry ou Calibry Mini, intègrent plusieurs options de suivi, telles que le suivi de texture.
Vidéo 4 :Numérisation 3D avec marqueurs. Source :Thor3Dscanner.com.
Ensuite, le nuage de points doit être nettoyé en supprimant les points qui ne correspondent pas à la surface, soit parce qu'ils appartiennent à des objets de l'environnement, soit parce qu'ils apparaissent en raison d'une erreur du scanner 3D. Un scanner 3D de qualité associé à un bon processus de numérisation fournira un nuage de points propre avec peu ou pas de points en excès.
Une fois le nuage de points nettoyé, il faudra reconstruire le maillage . La sélection des paramètres appropriés fournira des maillages précis et correctement ajustés.
Après avoir converti le nuage de points en un maillage polygonal, il devra être vérifié et réparé. L'un des défauts les plus courants est généralement l'apparition d'espaces dans le maillage en raison de données manquantes lors de la numérisation. Le seul moyen de réparer ces défauts sera d'appliquer un patch par interpolation. La qualité des algorithmes d'interpolation implémentés dans le logiciel influencera la qualité de la reconstruction.
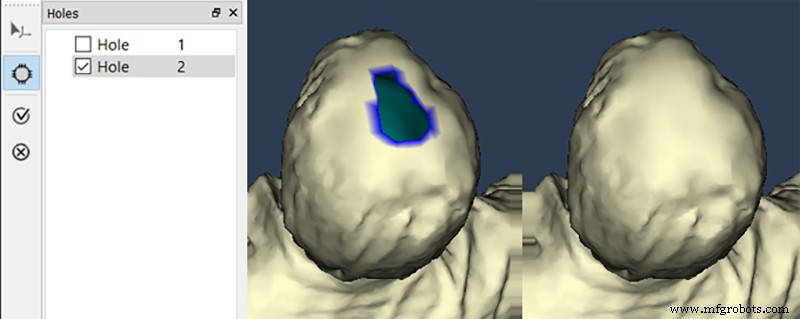
Image 3 :Réparation d'un trou dans le maillage avec Calibry Nest. Source :Thor3Dscanner.com.
Enfin, il faudraoptimiser le maillage. Le type d'optimisation dépendra largement de l'application finale. Le maillage peut être simplifié, sacrifiant la résolution au prix d'une réduction de la taille du fichier. La simplification du maillage peut souvent aider à corriger de petits défauts, aobtenir des géométries plus simples et plus homogènes . D'autre part, la résolution du maillage peut être augmentée en interpolant de nouveaux éléments. L'augmentation de la résolution du maillage n'augmente pas la résolution de la capture , cependant, il peut aider à obtenir une plus grande continuité et douceur dans les surfaces avec courbure.
Certains scanners 3D, tels que ceux basés sur la lumière structurée, permettent de capturer simultanément la texture et la couleur des surfaces à travers des photographies. Cela permet une étape supplémentaire dans le traitement en permettant à la texture d'être mappée sur le maillage. Ceci est particulièrement intéressant pour les applications liées à l'art et au divertissement.
Vidéo 5 :Modèle texturé 3D scanné avec Calibry. Source :Thor3Dscanner.com.
Il existe de nombreuses applications possibles pour les scanners 3D dans différents secteurs industriels. En médecine et en orthopédie, par exemple, ils peuvent reproduire numériquement des parties du corps d'un patient pour développer des orthèses personnalisées. Dans le domaine du divertissement, ils ont été largement utilisés dans les films et les jeux vidéo pour créer des jumeaux numériques d'acteurs. Ils sont de plus en plus utilisés dans l'art et l'archéologie pour produire des répliques numériques d'œuvres d'art et d'artefacts historiques que les scientifiques du monde entier peuvent étudier. En ingénierie, ils ont facilité l'élaboration de plans de pièces complexes, réduisant le temps de travail et réalisant des modèles plus précis. En inspection, ils facilitent la comparaison de la géométrie d'un composant dans le temps pour détecter les déformations qui aident à prévenir les défaillances.
Les scanners 3D sont aujourd'hui un outil indispensable dans de nombreux secteurs. Le développement de nouvelles techniques, telles que la lumière structurée, a conduit à de nouveaux scanners 3D qui offrent une résolution et une précision élevées, associées à une vitesse d'acquisition de données élevée et à un prix économique. Les nouveaux scanners Calibry et Calibry Mini ou la série EinScan de Shining en sont des exemples.
impression en 3D