


bouée intelligente - [Résumé]
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 |
À propos de ce projet
Article de blog récapitulatif sur les bouées intelligentes
Salut à tous! Ceci est un bref (ish) résumé de notre projet de bouée intelligente. Nous allons décomposer la construction technique en articles distincts, pour expliquer :l'électronique, l'impression 3D et le tableau de bord.
Vous le ferez Besoin
Pour la construction complète d'une bouée intelligente, vous avez besoin de BEAUCOUP de choses. Nous aurons la répartition des matériaux spécifiques requis pour chaque étape de la construction dans le didacticiel correspondant, mais pour un certain contexte, voici la liste complète :
- Arduino Nano - Amazon
- Raspberry Pi Zero - Amazon
- Batterie (18650) - Amazon
- Panneaux solaires - Amazon
- Diodes de blocage - Amazon
- Contrôleur de charge - Amazon
- Buck booster - Amazon
- Module GPS - Amazon
- GY-86 (accéléromètre, gyroscope, baromètre, boussole) - Amazon
- Capteur de température de l'eau - Amazon
- Module de surveillance de l'alimentation - Amazon
- Module horloge temps réel - Amazon
- Modules radio - Amazon
- module multiplexeur i^2c - Amazon
- Imprimante 3D - Amazon
- Filament PETG - Amazon
- Époxy - Amazon
- Peinture en aérosol d'apprêt - Amazon
- Corde - Amazon
- Flotteurs - Amazon
- Colle - Amazon
Tout le code utilisé peut être trouvé sur https://gitlab.com/t3chflicks/smart-buoy.
Que fait-il ?
Les capteurs à bord de la bouée intelligente lui permettent de mesurer :la hauteur des vagues, la période des vagues, la puissance des vagues, la température de l'eau, la température de l'air, la pression atmosphérique, la tension, l'utilisation actuelle et la localisation GPS. Dans un monde idéal, il aurait également mesuré la direction des vagues - sur la base des mesures qu'il a pu prendre, nous étions tout près de le faire fonctionner. Cependant, cela s'est avéré assez compliqué et c'est en fait un problème énorme dans la communauté de recherche actuelle. S'il y a quelqu'un qui peut nous aider et suggérer un moyen efficace d'obtenir des mesures de la direction des vagues, faites-le nous savoir - nous aimerions comprendre comment nous pourrions le faire fonctionner !
Toutes les données collectées par la bouée sont envoyées par radio à une station de base, qui est un Raspberry Pi. Nous avons créé un tableau de bord pour les afficher en utilisant Vue JS.
Construire
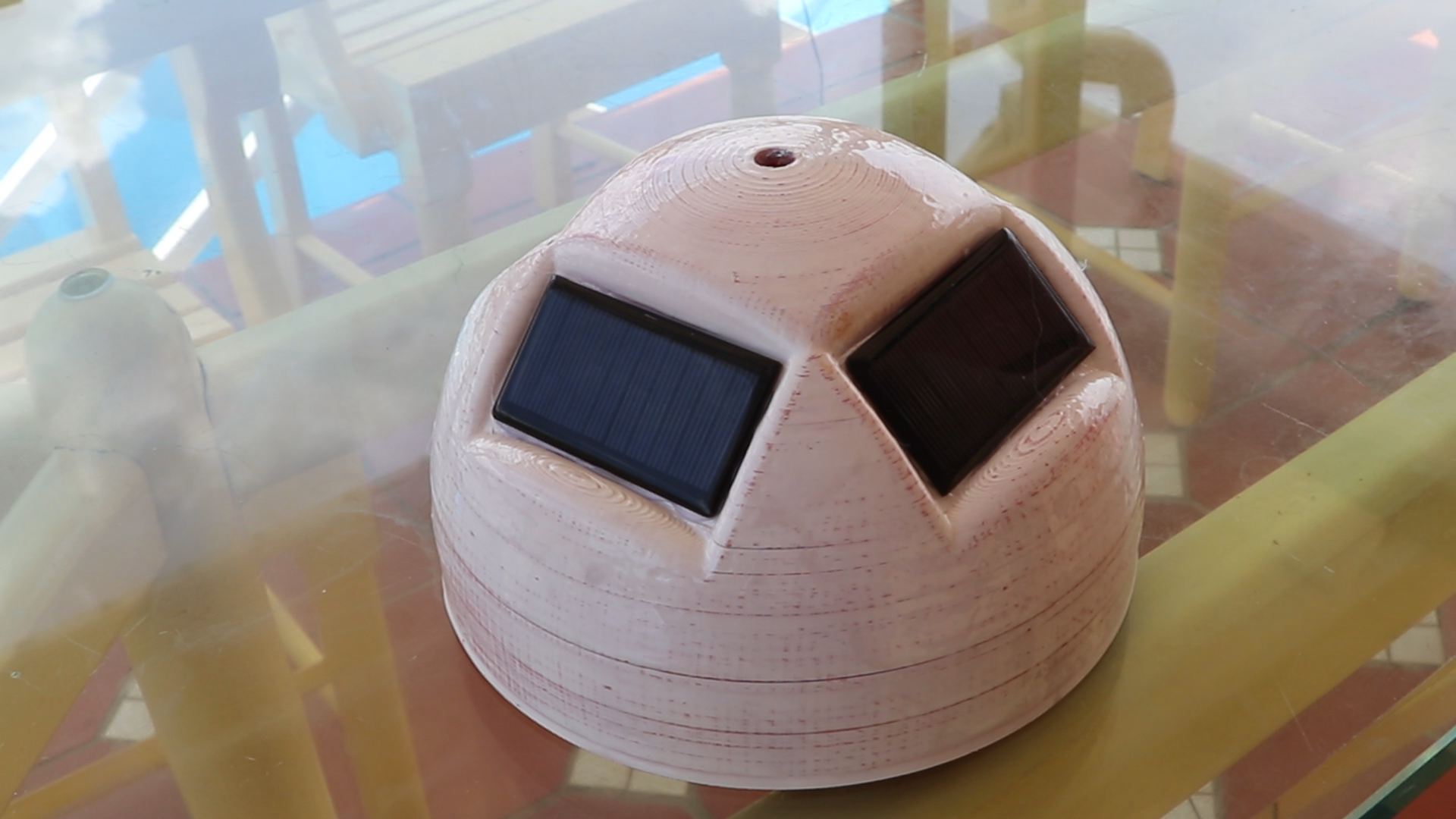
Boîtier de bouée
Cette bouée était probablement la chose la plus difficile que nous ayons imprimée jusqu'à présent. Il y avait tellement de choses à prendre en considération car ce serait dans la mer, exposé aux éléments et à beaucoup de soleil. Nous en reparlerons plus dans un autre épisode de la série Smart Buoy. En bref :nous avons imprimé une sphère presque creuse en deux moitiés. La moitié supérieure comporte des fentes pour les panneaux solaires et un trou pour le passage d'une antenne radio. La moitié inférieure a un trou pour le passage d'un capteur de température et une poignée pour attacher une corde.
Après avoir imprimé la bouée à l'aide de filament PETG, nous l'avons poncée, peinte à la bombe avec un apprêt de remplissage, puis appliqué quelques couches d'époxy.
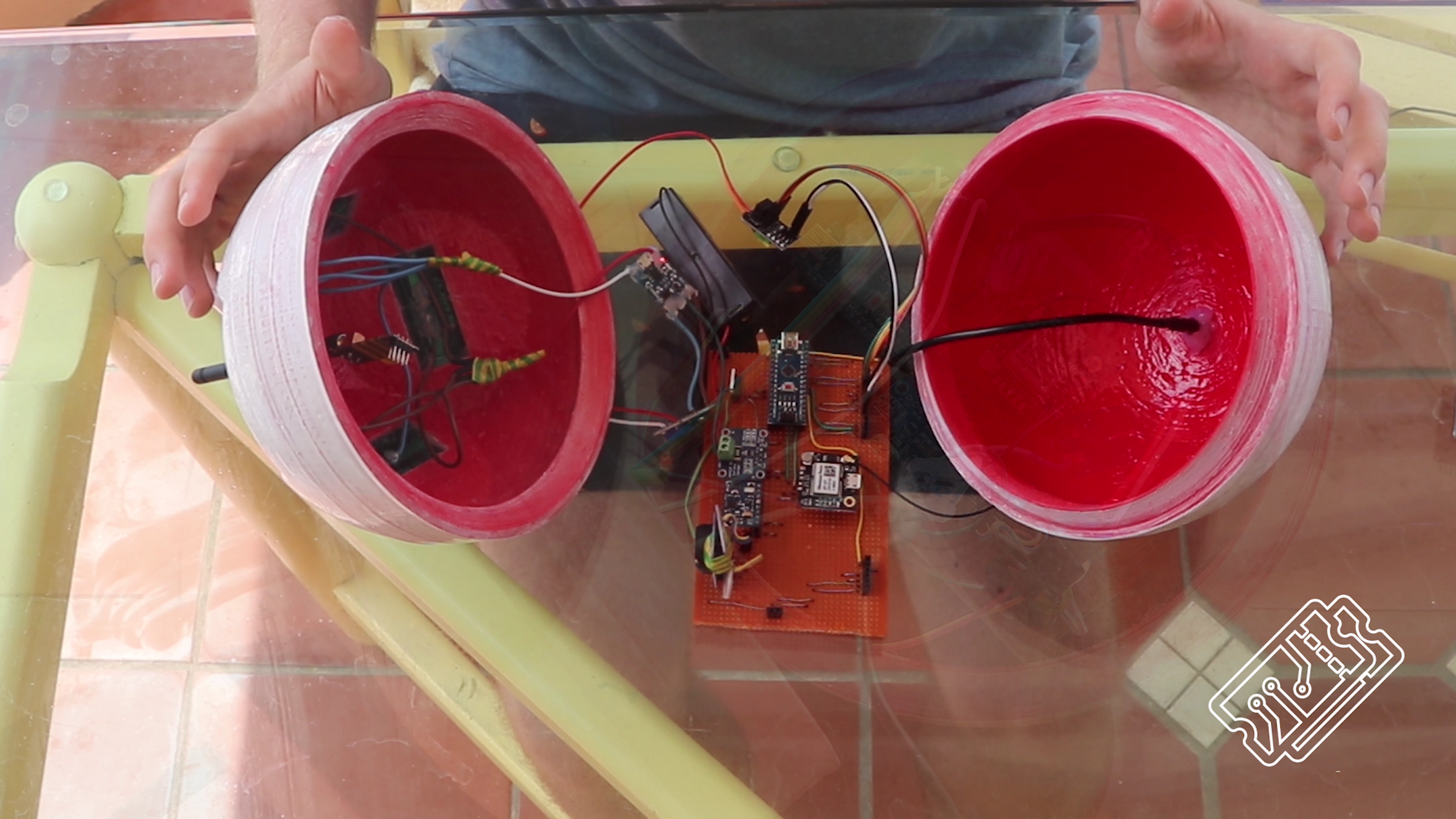
Une fois la préparation de la coque terminée, nous avons mis toute l'électronique à l'intérieur puis scellé la sonde de température d'eau, l'antenne radio et les panneaux solaires à l'aide d'un pistolet à colle. Enfin, nous avons scellé les deux moitiés avec de la colle/adhésif StixAll (super colle pour avion).
Et puis nous espérions qu'il était étanche…




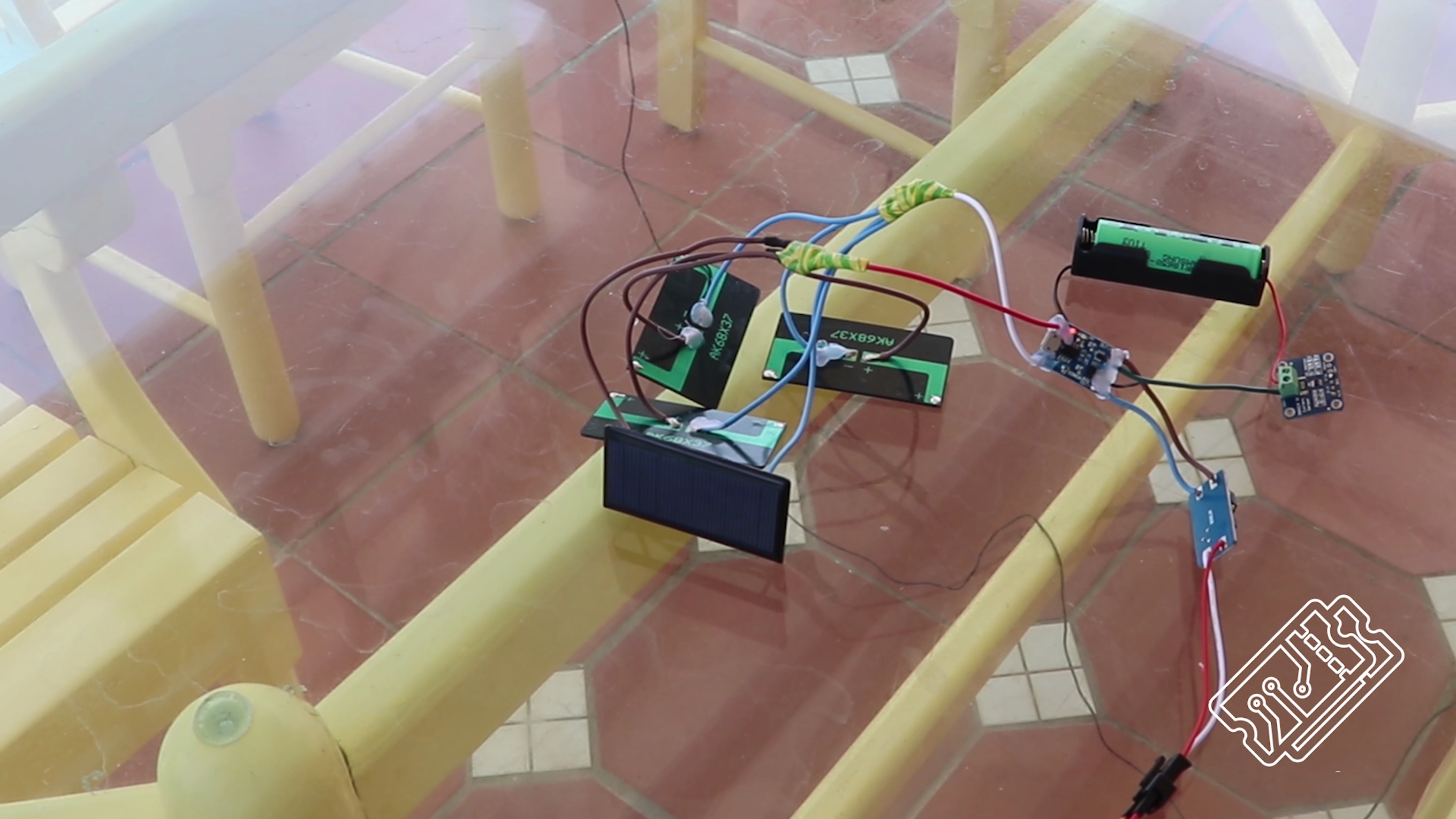
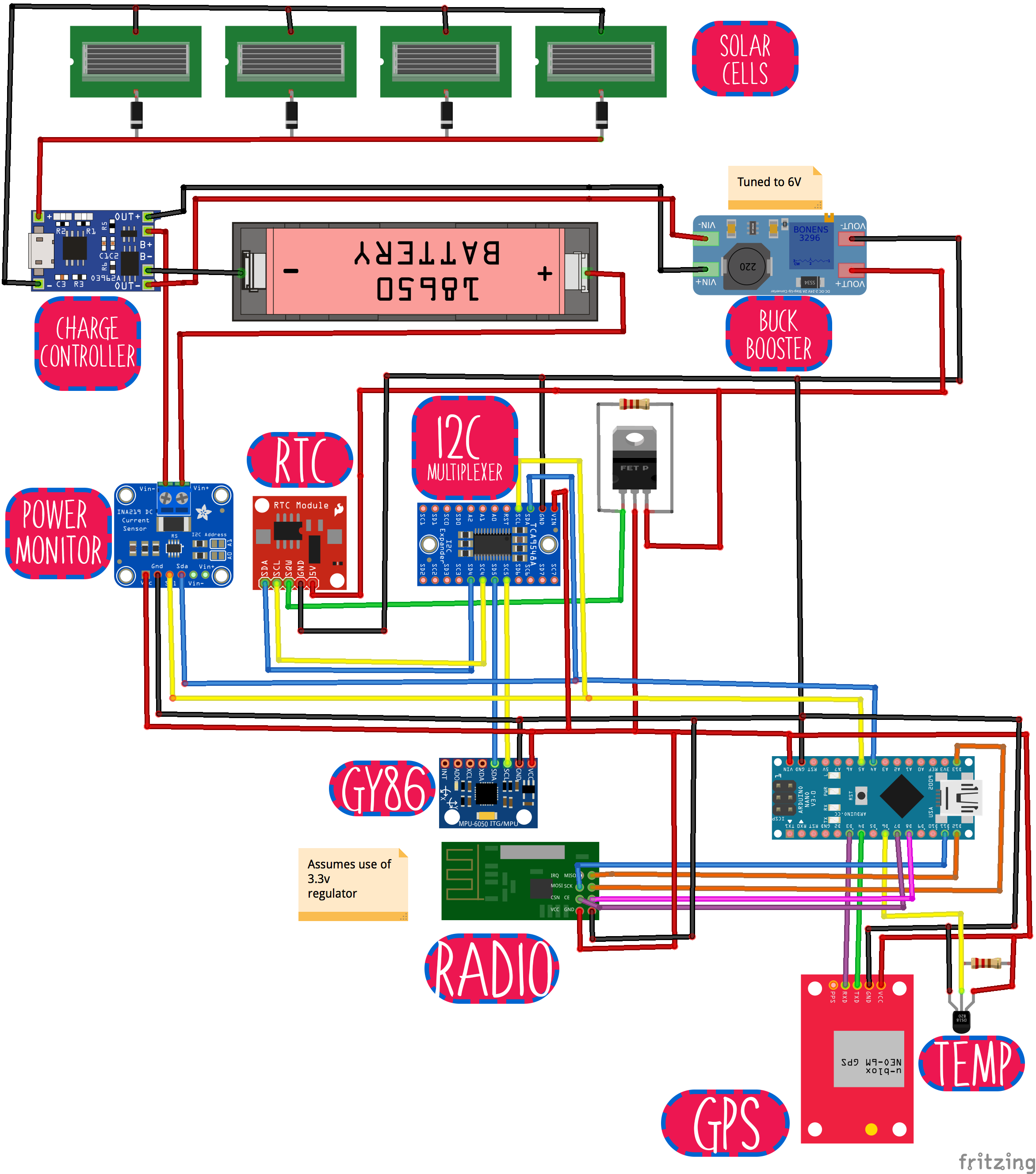
Électronique de bouée
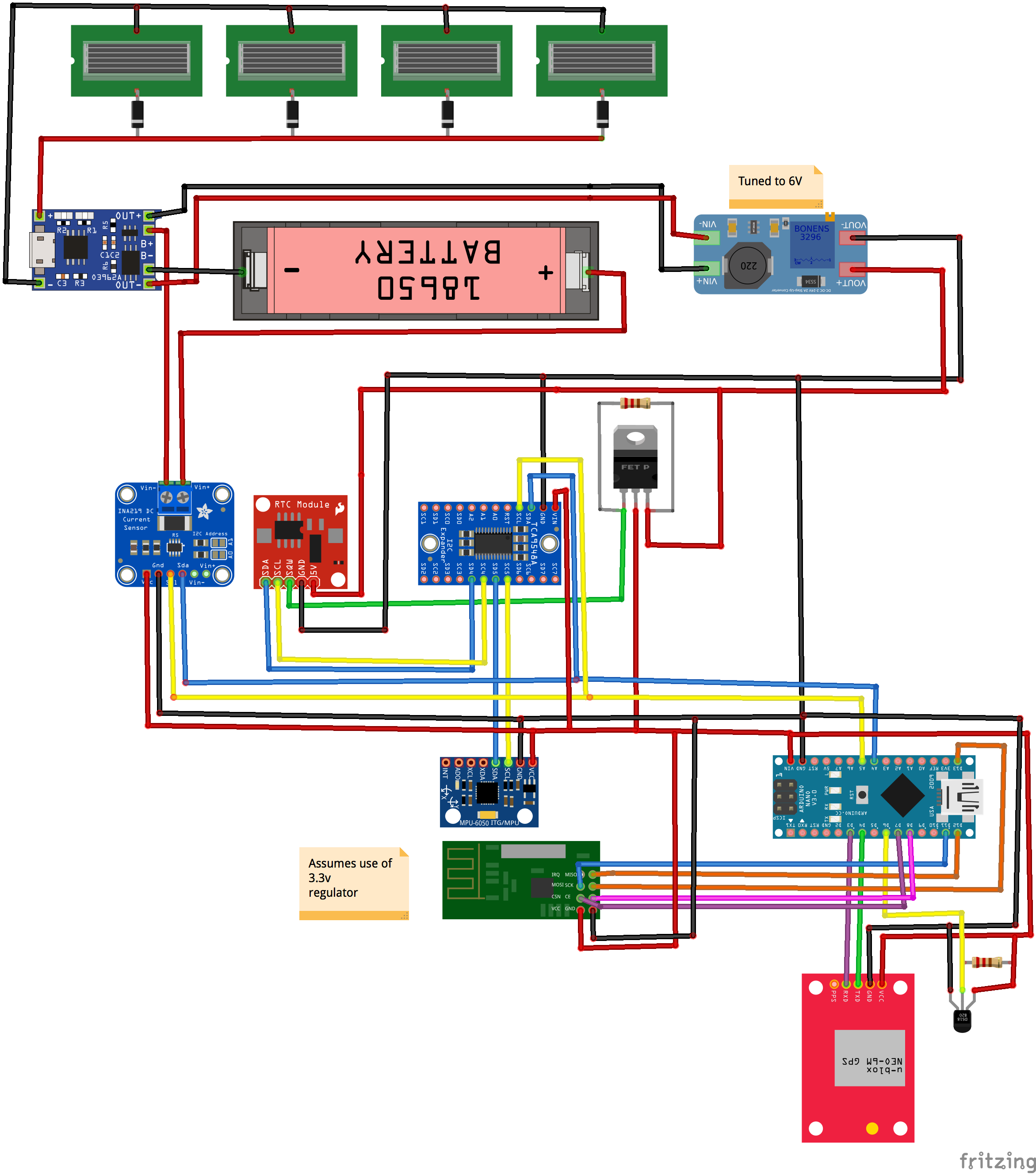
- Photo du circuit complet pour bouée
La bouée a beaucoup de capteurs à bord et nous les détaillons dans le tutoriel correspondant. Comme il s'agit d'un résumé, nous essaierons de rester informatif, mais bref !
La bouée est alimentée par une batterie 18650, qui est chargée par quatre panneaux solaires 5V. Cependant, seule l'horloge temps réel est alimentée en permanence. La bouée utilise la broche de sortie de l'horloge en temps réel pour contrôler un transistor permettant au courant d'entrer dans le reste du système. Lorsque le système est allumé, il commence par obtenir des mesures des capteurs, y compris une valeur de tension du module de surveillance de l'alimentation. La valeur donnée par le module de surveillance de l'alimentation détermine combien de temps le système dort avant de prendre la prochaine série de lectures. Une alarme est réglée pour cette heure, puis le système s'éteint !
Le système lui-même est composé de nombreux capteurs et d'un module radio connecté à un Arduino. Le module GY-86, RealTimeClock (RTC), le module Power Monitor et le multiplexeur I2C communiquent tous avec l'Arduino en utilisant I2C. Nous avions besoin du multiplexeur I2C car le GY-86 et le module RTC que nous avons utilisés ont tous deux la même adresse. Le module multiplexeur vous permet de communiquer sans problème supplémentaire, même si cela peut être un peu exagéré.
Le module radio communique via SPI. À l'origine, nous avions également un module de carte SD, mais cela a causé tellement de maux de tête en raison de la taille de la bibliothèque SD que nous avons décidé de le supprimer.
Jetez un œil au code. Il est probable que vous ayez des questions - probablement aussi des doutes persistants - et nous serions heureux de les entendre. Les didacticiels approfondis incluent des explications sur le code, alors j'espère qu'ils le rendront un peu plus clair !
Nous avons essayé de séparer logiquement les fichiers de code et d'utiliser un fichier principal pour les inclure - une méthode qui a parfaitement fonctionné.
Électronique de la station de base
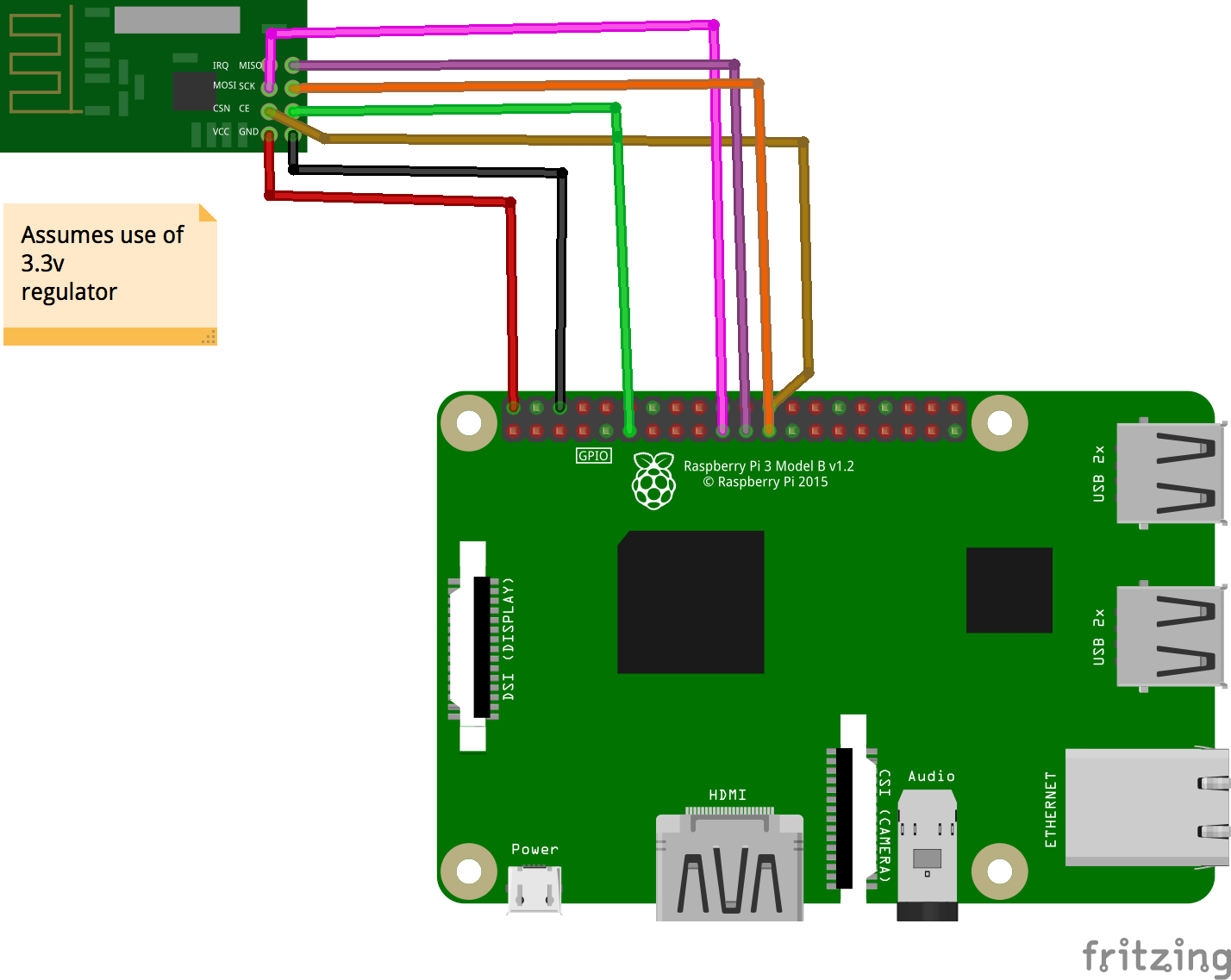
- Image du circuit pi
La station de base est réalisée à l'aide d'un Raspberry Pi Zero avec un module radio attaché. Nous avons obtenu le boîtier sur https://www.thingverse.com/thing:1595429. Vous êtes fabuleux, merci beaucoup !
Une fois le code exécuté sur l'Arduino, il est assez simple d'obtenir les mesures sur le Raspberry Pi en exécutant le code receive.py.
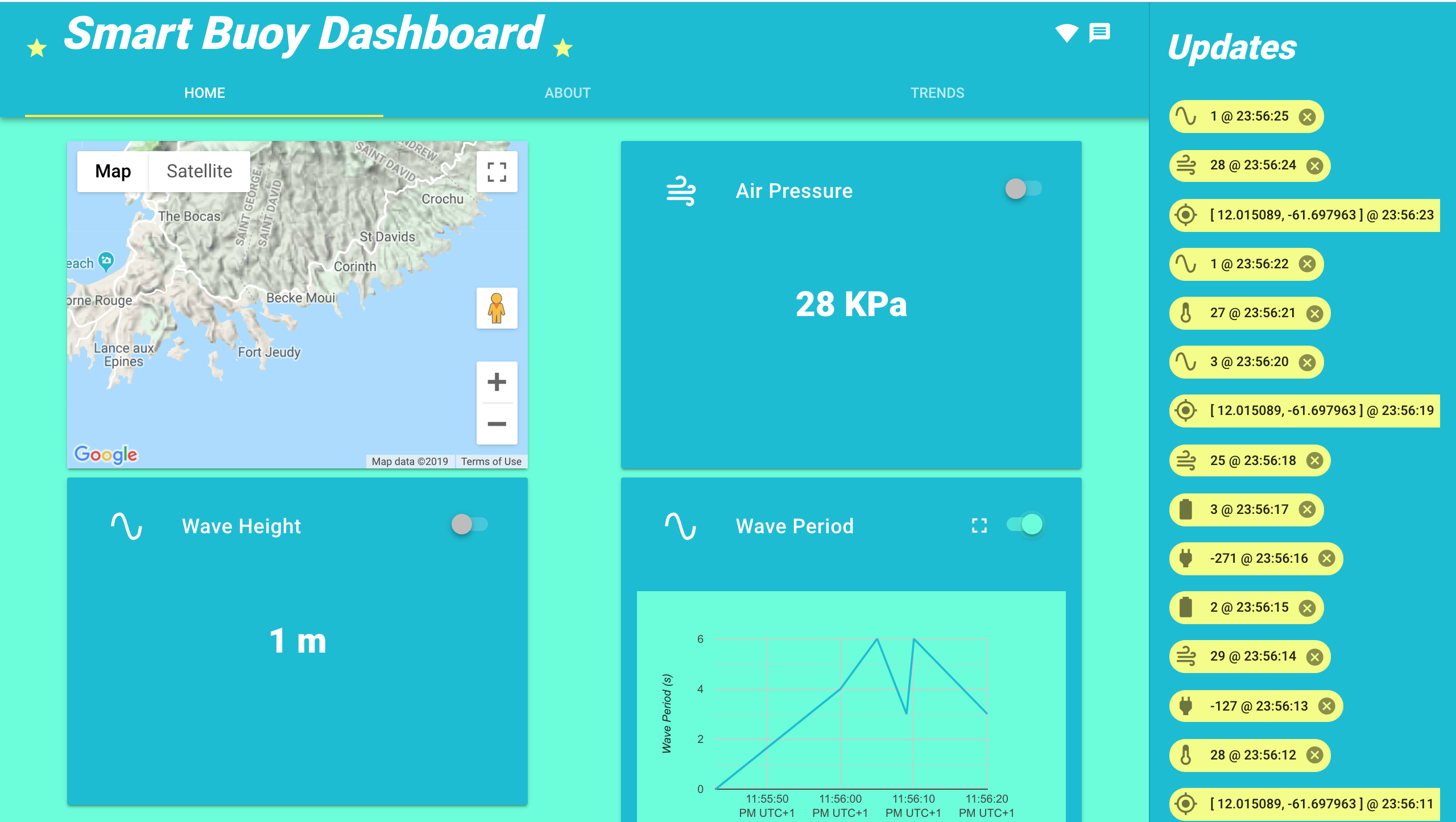
L'un des membres de l'équipe T3ch Flicks est un développeur Web qui a récemment appris Vue JS. Ils sont devenus très enthousiastes lorsque nous avons décidé que nous avions besoin d'un tableau de bord et nous ont époustouflés en créant ce joli tableau de bord légitime.
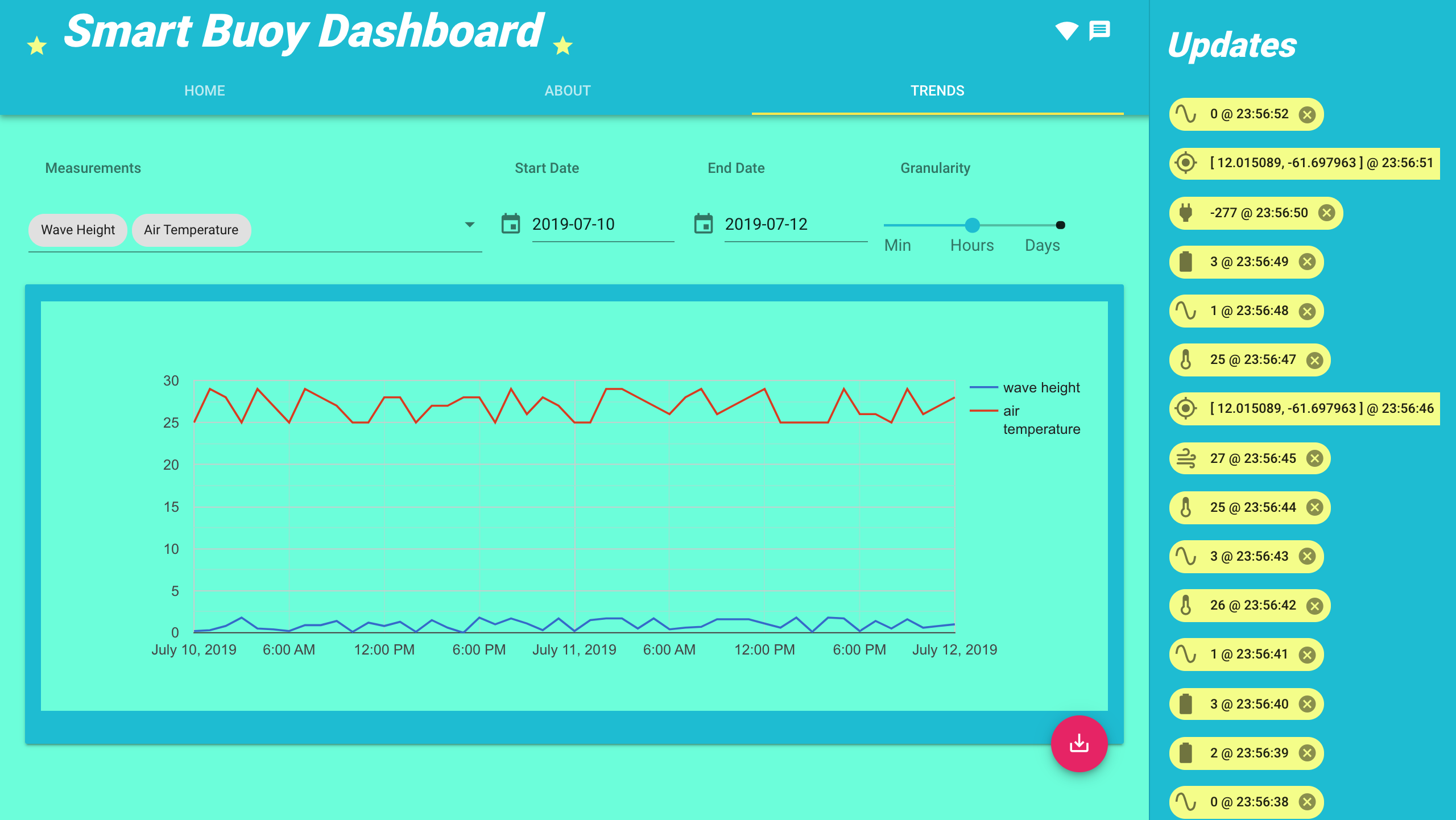
Tableau de bord
Vous montrer comment nous avons fait tout le tableau de bord serait un peu une odyssée car c'était un projet assez long et compliqué. Si quelqu'un veut savoir comment nous l'avons fait, faites-le nous savoir - le développeur Web résident de T3ch Flicks serait plus qu'heureux de faire un tutoriel à ce sujet !
Une fois que vous avez placé ces fichiers sur un Raspberry Pi, vous devriez pouvoir exécuter le serveur et voir le tableau de bord avec les données entrantes. Pour des raisons de développement et pour voir à quoi ressemblerait le tableau de bord s'il était alimenté par de bonnes données régulières, nous avons ajouté un faux générateur de données dans le serveur. Exécutez-le si vous voulez voir à quoi cela ressemble lorsque vous avez plus de données.
Nous expliquons également cela en détail dans un épisode ultérieur.
Version 2 ??
Problèmes
Ce projet n'est absolument pas parfait - nous aimons le considérer davantage comme un prototype/preuve de concept. Bien que le prototype fonctionne à un niveau fondamental :il flotte, prend des mesures et est capable de les transmettre, nous avons appris beaucoup de choses et changerions pour la version 2 :
- Notre plus gros problème était de ne pas pouvoir changer le code de la bouée après l'avoir collée. C'était vraiment un oubli et cela pouvait être résolu très efficacement avec un port USB recouvert d'un joint en caoutchouc. Cela, cependant, aurait ajouté une toute autre couche de complexité au processus d'imperméabilisation de l'impression 3D !
- Les algorithmes que nous avons utilisés étaient loin d'être parfaits. Nos méthodes pour déterminer les propriétés des ondes étaient assez grossières et nous avons fini par passer beaucoup de temps à lire des mathématiques pour combiner les données des capteurs du magnétomètre, de l'accéléromètre et du gyroscope. Ce n'était pas super utile à la fin, mais nous avons trouvé cette vidéo intéressante. Si quelqu'un comprend cela et est prêt à aider, nous pensons que nous pourrions rendre ces mesures beaucoup plus précises.
- Certains des capteurs ont agi un peu bizarrement. Le capteur de température de l'eau était celui qui se distinguait comme étant particulièrement louche - parfois près de 10 degrés par rapport à la température réelle. La raison en est peut-être qu'il s'agit simplement d'un mauvais capteur ou que quelque chose le réchauffait...
Améliorations
L'Arduino était bon, mais comme mentionné précédemment, nous avons dû supprimer le module de carte SD (qui était censé être la sauvegarde des données si les messages radio ne pouvaient pas être envoyés) en raison de problèmes de mémoire. Nous pourrions le remplacer par un microcontrôleur plus puissant comme un Arduino Mega ou un Teensy ou simplement utiliser un autre Raspberry Pi Zero. Cependant, cela aurait augmenté les coûts et la consommation d'énergie.
Le module radio que nous avons utilisé a une portée limitée de quelques kilomètres avec une visibilité directe https://www.youtube.com/watch?v=57pdX6b0sfw . Cependant avec de (très) nombreuses bouées autour de l'île nous aurions pu former un réseau maillé tel que https://www.youtube.com/watch?v=xb7psLhKTMA . Il existe de nombreuses possibilités de transmission de données à longue distance, notamment lora, grsm. Si nous pouvions utiliser l'un d'entre eux, peut-être qu'un réseau maillé autour de l'île serait possible !
Utiliser notre bouée intelligente pour la recherche
Nous avons construit et lancé la bouée à Grenade, une petite île du sud des Caraïbes. Pendant que nous étions là-bas, nous avons discuté avec le gouvernement de la Grenade, qui a déclaré qu'une bouée intelligente comme celle que nous avons créée serait utile pour fournir des mesures quantitatives des caractéristiques de l'eau. Des mesures automatisées réduiraient certains efforts humains et erreurs humaines et fourniraient un contexte utile pour comprendre l'évolution des côtes. Le gouvernement a également suggéré que la prise de mesures du vent serait également une fonctionnalité utile à leurs fins. Aucune idée de comment nous allons gérer celui-ci, donc si quelqu'un a des idées… Une mise en garde importante est que bien que ce soit une période vraiment passionnante pour la recherche côtière, en particulier impliquant la technologie, il y a un long chemin à parcourir avant qu'il puisse être pleinement adopté .
Merci d'avoir lu le billet de blog récapitulatif de la série de bouées intelligentes. Si vous ne l'avez pas déjà fait, veuillez regarder la vidéo à ce sujet sur notre chaîne YouTube. Dans la première partie de la série, nous vous montrerons comment nous avons pris les mesures des vagues et de la température. Si vous avez apprécié notre travail et que vous souhaitez nous aider à faire plus, ce serait formidable si vous envisagez de nous parrainer sur Patreon. Merci beaucoup à Giacomo, qui est notre premier sponsor Patreon !

Consultez le prochain article de blog où nous montrons comment nous avons effectué des mesures de vagues et de température https://create.arduino.cc/projecthub/t3chflicks/smart-buoy-making-wave-and-temperature-measurements-257ca1
Code
Dépôt de bouées intelligentes
https://gitlab.com/t3chflicks/smart-buoy
Schémas
Processus de fabrication