


tireur Lego automatisé
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 |
Outils et machines nécessaires
| |
|
Applications et services en ligne
 |
|
À propos de ce projet
Ce projet consiste à faire tirer automatiquement les canons Lego. J'aime jouer avec les legos et j'aime utiliser Arduinos, j'ai donc décidé de faire ce projet pendant mon temps libre. Les servomoteurs, avec leurs cornes attachées, tournent en frappant le levier et en tirant avec le canon. Un excellent premier, deuxième ou troisième projet pour les débutants !
Ceci est un guide étape par étape sur la façon de le faire.
Étape 1 :Le matériel
Étape 1 Partie 1 : Matériel Bases
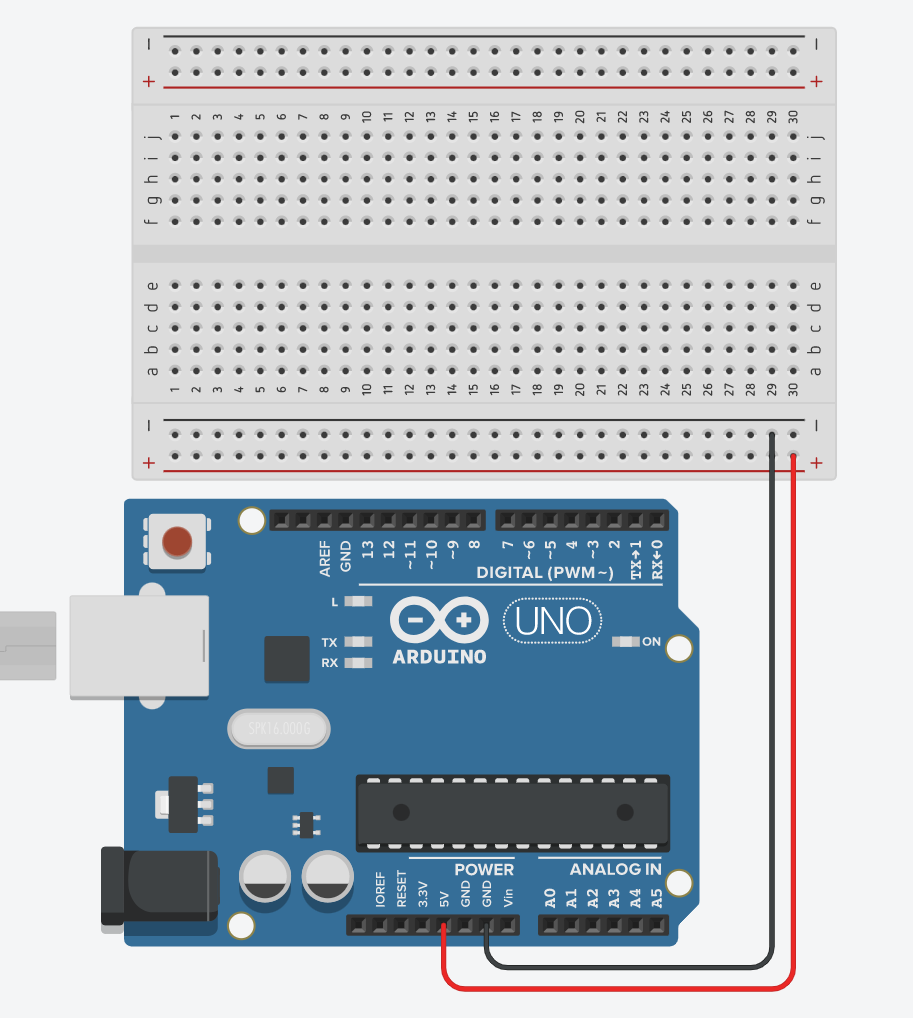
Commencez par 5V allant à la rangée chargée positivement et GRND allant à la rangée chargée négativement. Cela ressemblera à ceci -
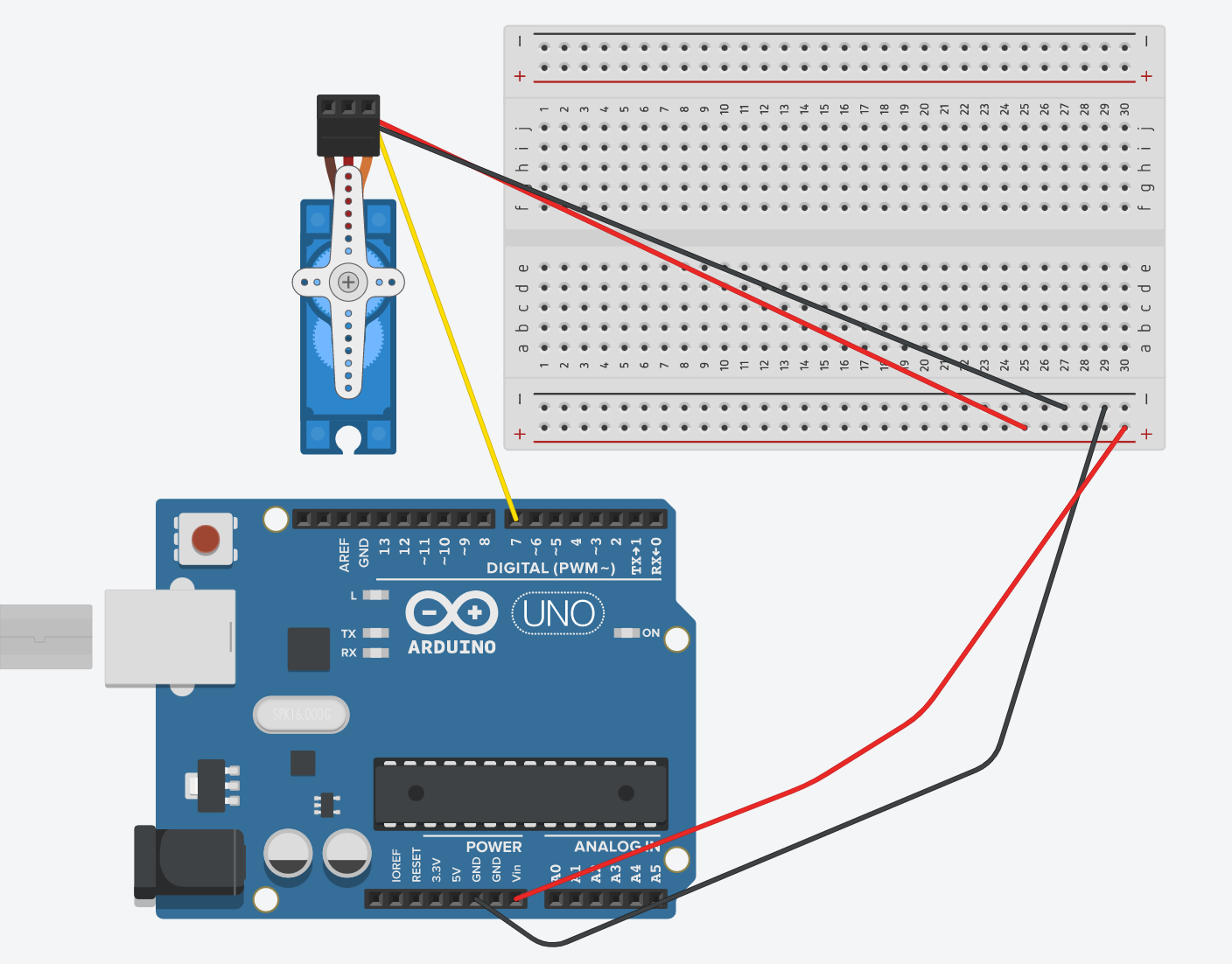
Étape 1 Partie 2 :Branchement du servomoteur 1
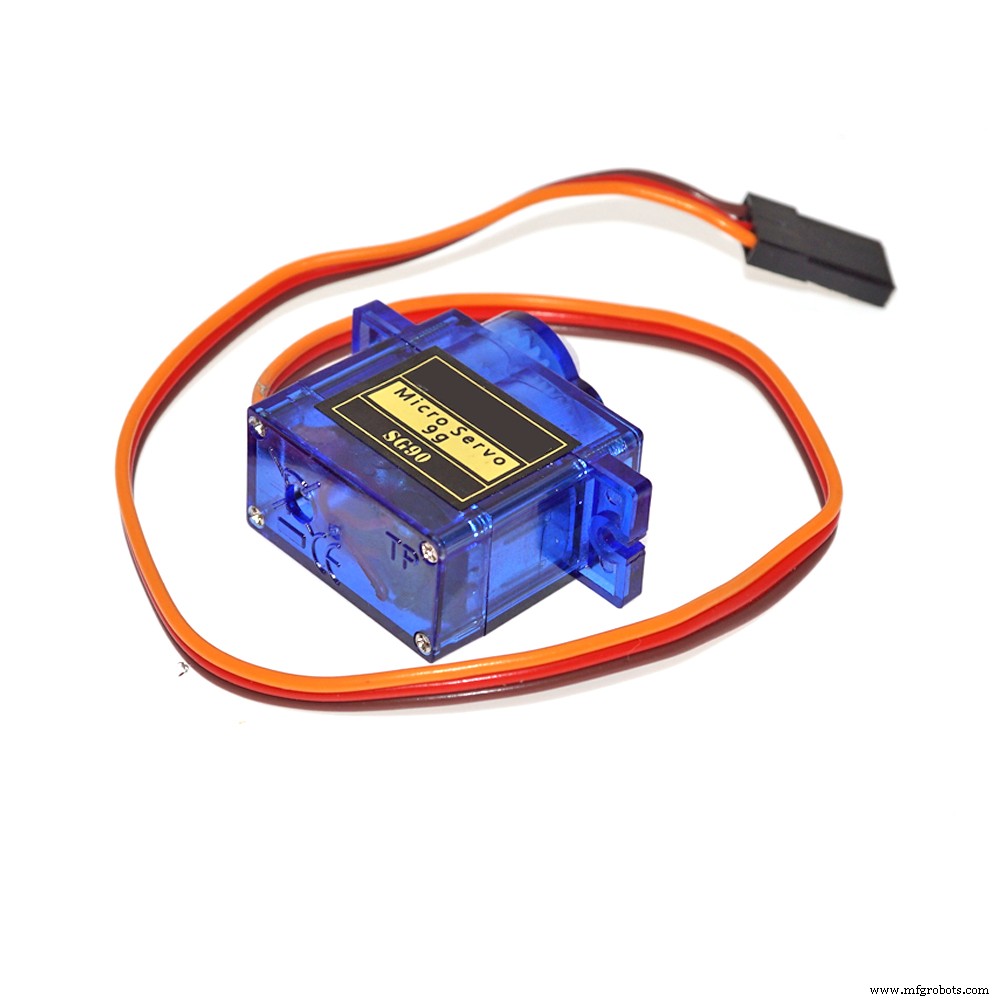
Le servo a trois fils - l'orange/jaune (signal) occupera une fente dans le NUMÉRIQUE (PWM ~), le rouge (alimentation) ira à VIN (qui est n'importe quelle broche de la rangée positive), et le le fil noir/marron (GRND) ira à la rangée chargée négativement connectée à la broche GRND sur l'Uno. La broche numérique que j'ai utilisée pour mon premier servo est 7. Voici à quoi ressemble le schéma lorsque le premier servo est accroché -
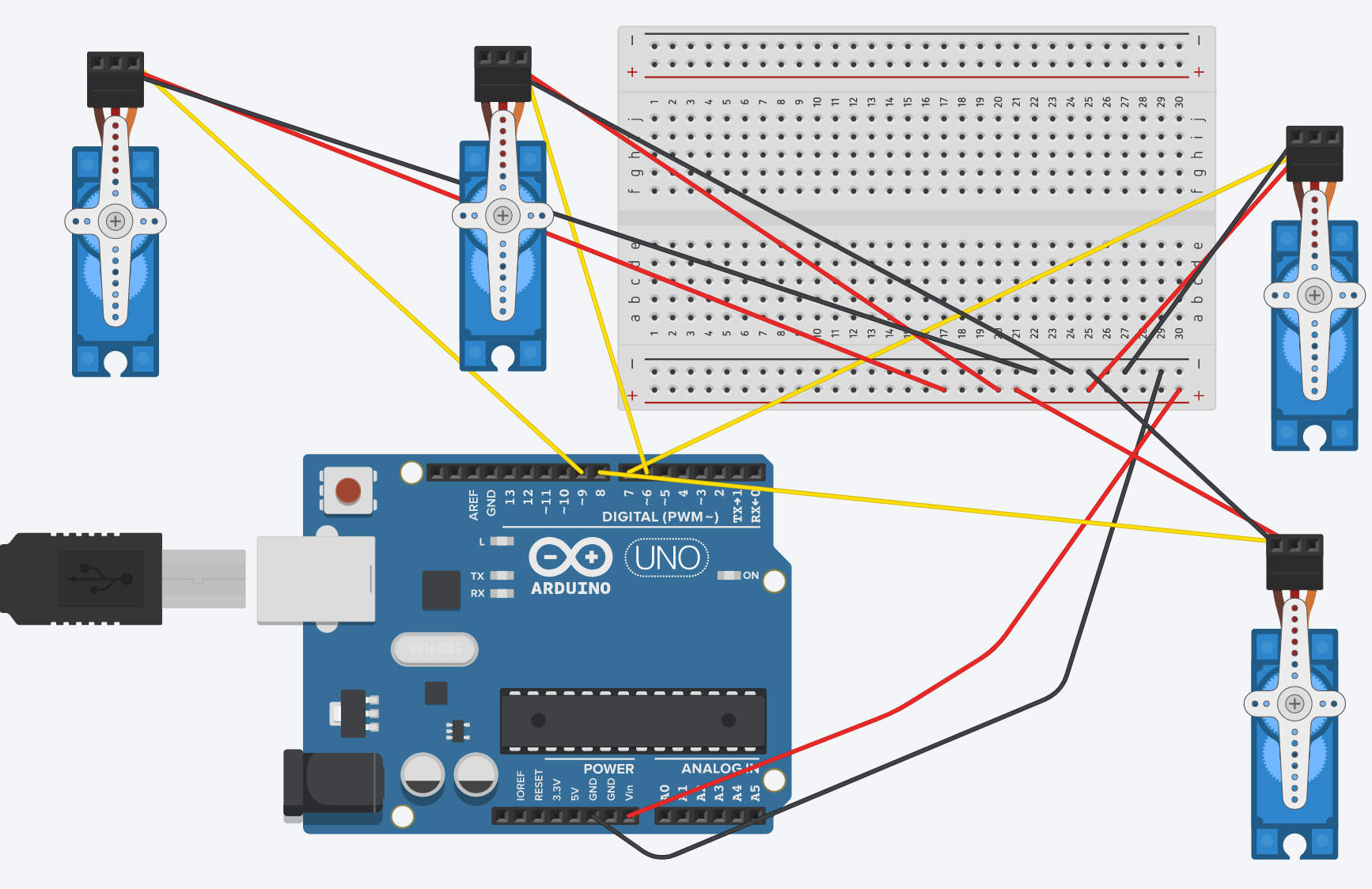
Étape 1 Partie 3 : câblage du reste des servos
Une fois que vous avez maîtrisé les servos, le reste devrait être un jeu d'enfant. Une chose à noter, cependant - vous devez rester cohérent avec les broches numériques que vous avez attachées à votre servo dans le code.
Par exemple, le code (qui se trouve en bas de la page), indique-
secondCannon.attach(8) ; Par conséquent, le deuxième Servo doit être connecté à la broche numérique 8.
De la même manière, le troisième Servo doit être attaché à la broche numérique 6, et le quatrième doit être attaché à la neuvième broche numérique.
Cependant, ceux-ci peuvent être modifiés afin qu'ils soient dans l'ordre que vous souhaitez qu'ils soient. Assurez-vous simplement que vous modifiez à la fois le matériel et le logiciel par souci de cohérence, sinon le code ne fonctionnera pas.
Pour exécuter avec le code fourni en bas, voici à quoi devrait ressembler le schéma-

Toutes nos félicitations! Vous avez officiellement terminé la partie matérielle de ce projet.
Étape 2 :Le logiciel
Maintenant, copiez et collez le code en bas de la page sur un croquis Arduino et téléchargez-le. Assurez-vous d'avoir la bibliothèque Servo avant de télécharger le code, sinon cela ne fonctionnera pas ! Vous trouverez ci-dessous un guide étape par étape expliquant le code et ce qu'il signifie lors de l'exécution du programme.
#include //Y compris la bibliothèque pour le ServosServo firstCannon ; //Définition du premier canon en tant que second canon ServoServo ; //Définition du deuxième canon en tant que troisième canon ServoServo ; //Définition du troisième canon en tant que quatrième canon ServoServo ; //Définition du quatrième canon en tant que servo
Ce code configure le Servo.h bibliothèque, qui jouera un rôle fondamental dans le code. Cela peut être illustré par les lignes suivantes, en utilisant la bibliothèque pour définir quatre canons comme servos, ou moteurs qui peuvent être tournés à 180 degrés.
void setup() { //Code de configuration, ou code qui n'est exécuté qu'une seule fois Serial.begin(9600); //Démarrer la communication série Serial.println("Défendez les clones ! Mettez en place les défenses !") //Imprime quelque chose dans le moniteur série firstCannon.attach(7) ; // Attachez la broche numérique 7 au premier canon secondCannon.attach(8) ; // Attachez la broche numérique 8 au deuxième canon thirdCannon.attach(6); // Attachez la broche numérique 6 au troisième canon quatrièmeCannon.attach(9) ; //Attachez la broche numérique 9 au quatrième canon}
Le configuration vide() le code est utilisé dans presque tous les projets Arduino, et c'est un code qui n'est exécuté qu'une seule fois. Dans ce cas, nous commençons la nouvelle ligne Serial Communication à 9600 bauds. Ensuite, nous imprimons des éléments dans le moniteur série. Afin de programmer les servos, nous devons connecter leurs noms à leurs broches numériques respectives. C'est le but du .attach() morceau de code.
void loop() { //Code en boucle, ou code exécuté un nombre infini de fois Serial.println("Début de la séquence de tir") //Imprime quelque chose dans le moniteur série firstCannon.write(180); // Faire pivoter le premier servo de 180 degrés, déclenchant le premier retard du canon (100); //Attendez 1/10 de seconde firstCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde secondCannon.write(180); // Faire pivoter le deuxième servo de 180 degrés, déclenchant le deuxième retard du canon (100); //Attendez 1/10 de seconde de secondeCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde thirdCannon.write(180); // Faire pivoter le troisième servo de 180 degrés, déclenchant le troisième retard du canon (100); //Attendez 1/10 de seconde thirdCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde quatrièmeCannon.write(180); //Déviation du premier quatrième de 180 degrés, déclenchant le quatrième retard du canon (100); //Attendez 1/10 de seconde quarterCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde Serial.println("Tous les canons ont tiré"); Serial.println("Préparer le rechargement"); retard (10000); Serial.println("Rechargement terminé. Préparation au tir à nouveau")}
Ceci est le dernier morceau de code, en utilisant le void boucle() fonction qui permet au code suivant d'être exécuté un nombre infini de fois. Ensuite, nous imprimons dans le Serial Monitor que les canons sont sur le point de tirer. Les servos de chaque canon doivent tourner à 180 degrés, puis revenir à la position d'origine, un à la fois. Après cela, il devrait y avoir 10 secondes (temps de rechargement) jusqu'à ce que le processus se répète à nouveau.
Si vous rencontrez d'autres problèmes lors du téléchargement du code, vous pouvez commenter dans la section commentaires et je vous répondrai dès que possible. Si cela fonctionne, passez à l'étape suivante.
Étape 3 :Installation
La dernière étape nécessite les canons lego et du ruban adhésif ordinaire à l'ancienne. Le canon lego ressemble à ceci -

Exécutez le code. Voyez dans quel sens tourne le servo. Collez le servo sur le canon lego de sorte que sa trajectoire le place sur une trajectoire de collision avec le levier au-dessus du canon dans l'image ci-dessus.
Bon travail! Vous avez officiellement terminé ce projet. Comme je l'ai dit, commentez dans la section ci-dessous si vous avez des questions.
Si vous avez aimé ce projet, consultez ces liens -
https://create.arduino.cc/projecthub/342600/basketball-hoop-with-buzzer-using-an-arduino-693bad?ref=user&ref_id=1536504&offset=1
https://create.arduino.cc/projecthub/ShreyanR/soundbox-826a56
Code
- Code Lego Gun Shooter
Code Lego Gun ShooterC/C++
Collez ceci dans Arduino IDE#include//Y compris la bibliothèque pour le ServosServo firstCannon ; //Définition du premier canon en tant que second canon ServoServo ; //Définition du deuxième canon en tant que troisième canon ServoServo ; //Définition du troisième canon en tant que quatrième canon ServoServo ; //Définition du quatrième canon en tant que configuration Servooid() { //Code de configuration, ou code qui n'est exécuté qu'une seule fois Serial.begin(9600); //Démarrer la communication série Serial.println("Défendez les clones ! Mettez en place les défenses !") //Imprimez quelque chose dans le moniteur série firstCannon.attach(7); // Attachez la broche numérique 7 au premier canon secondCannon.attach(8) ; // Attachez la broche numérique 8 au deuxième canon thirdCannon.attach(6); // Attachez la broche numérique 6 au troisième canon quatrièmeCannon.attach(9) ; // Attachez la broche numérique 9 au quatrième canon} void loop () { // Code de boucle ou code exécuté un nombre infini de fois Serial.println (" Début de la séquence de tir ") // Imprimez quelque chose dans le moniteur série firstCannon. écrire(180); // Faire pivoter le premier servo de 180 degrés, déclenchant le premier retard du canon (100); //Attendez 1/10 de seconde firstCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde secondCannon.write(180); // Faire pivoter le deuxième servo de 180 degrés, déclenchant le deuxième retard du canon (100); //Attendez 1/10 de seconde de secondeCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde thirdCannon.write(180); // Faire pivoter le troisième servo de 180 degrés, déclenchant le troisième retard du canon (100); //Attendez 1/10 de seconde thirdCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde quatrièmeCannon.write(180); //Déviation du premier quatrième de 180 degrés, déclenchant le quatrième retard du canon (100); //Attendez 1/10 de seconde quarterCannon.write(0); //Retourner le servo à sa position d'origine en vue du délai de rechargement (1000); //Attendez 1 seconde Serial.println("Tous les canons ont tiré"); Serial.println("Préparer le rechargement"); retard (10000); Serial.println("Rechargement terminé. Préparation au tir à nouveau")}
Schémas
Processus de fabrication