


Modulation de largeur d'impulsion
La modulation de largeur d'impulsion (PWM) utilise des signaux numériques pour contrôler les applications d'alimentation, tout en étant assez facile à reconvertir en analogique avec un minimum de matériel.
Les systèmes analogiques, tels que les alimentations linéaires, ont tendance à générer beaucoup de chaleur car ce sont essentiellement des résistances variables transportant beaucoup de courant. Les systèmes numériques ne génèrent généralement pas autant de chaleur. Presque toute la chaleur générée par un appareil de commutation est pendant la transition (qui se fait rapidement), alors que l'appareil n'est ni allumé ni éteint, mais entre les deux. En effet, la puissance suit la formule suivante :
P =E I, ou Watts =Tension X Courant
Si la tension ou le courant est proche de zéro, la puissance sera proche de zéro. PWM tire pleinement parti de ce fait.
Le PWM peut avoir de nombreuses caractéristiques d'un système de contrôle analogique, en ce sens que le signal numérique peut être en roue libre. PWM n'a pas à capturer de données, bien qu'il existe des exceptions à cela avec les contrôleurs haut de gamme.
Cycle d'utilisation
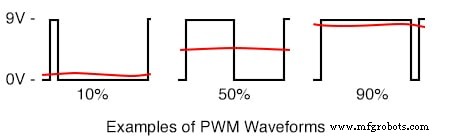
L'un des paramètres de toute onde carrée est le rapport cyclique. La plupart des ondes carrées sont à 50%, c'est la norme quand on en parle, mais elles n'ont pas besoin d'être symétriques. Le temps d'activation peut varier complètement entre l'arrêt du signal et l'activation complète, de 0 % à 100 %, et toutes les plages entre.
Vous trouverez ci-dessous des exemples de cycle de service de 10 %, 50 % et 90 %. Bien que la fréquence soit la même pour chacun, ce n'est pas une exigence.
La raison pour laquelle PWM est populaire est simple. De nombreuses charges, telles que les résistances, intègrent la puissance dans un nombre correspondant au pourcentage. La conversion en sa valeur équivalente analogique est simple. Les LED sont très non linéaires dans leur réponse au courant, donnent à une LED la moitié de son courant nominal et vous obtenez toujours plus de la moitié de la lumière que la LED peut produire. Avec PWM, le niveau de lumière produit par la LED est très linéaire. Les moteurs, qui seront traités plus tard, sont également très réactifs au PWM.
L'une des nombreuses façons dont le PWM peut être produit consiste à utiliser une forme d'onde en dents de scie et un comparateur. Comme indiqué ci-dessous, la dent de scie (ou l'onde triangulaire) n'a pas besoin d'être symétrique, mais la linéarité de la forme d'onde est importante. La fréquence de la forme d'onde en dents de scie est le taux d'échantillonnage du signal.
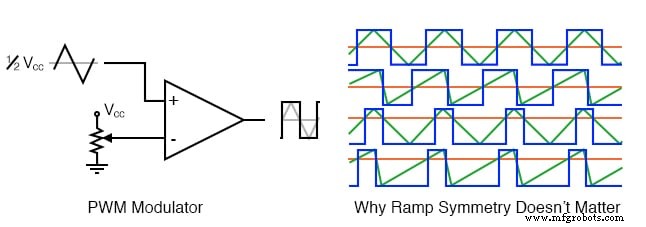
S'il n'y a pas de calcul impliqué, PWM peut être rapide. Le facteur limitant est la réponse en fréquence des comparateurs. Cela peut ne pas être un problème car bon nombre des utilisations sont à assez basse vitesse. Certains microcontrôleurs ont un PWM intégré et peuvent enregistrer ou créer des signaux à la demande.
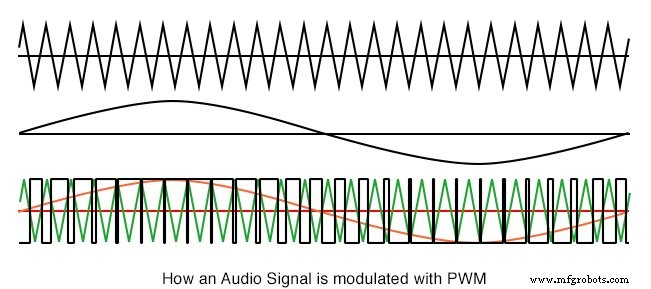
Les utilisations du PWM varient considérablement. C'est le cœur des amplificateurs audio de classe D, en augmentant les tensions, vous augmentez la sortie maximale, et en sélectionnant une fréquence au-delà de l'audition humaine (généralement 44Khz), le PWM peut être utilisé. Les haut-parleurs ne répondent pas à la haute fréquence mais dupliquent la basse fréquence, qui est le signal audio. Des taux d'échantillonnage plus élevés peuvent être utilisés pour une fidélité encore meilleure, et 100 Khz ou bien plus n'est pas rare.
Une autre application populaire est le contrôle de la vitesse du moteur. Les moteurs en tant que classe nécessitent des courants très élevés pour fonctionner. La possibilité de faire varier leur vitesse avec PWM augmente considérablement l'efficacité de l'ensemble du système. Le PWM est plus efficace pour contrôler les vitesses du moteur à bas régime que les méthodes linéaires.
Ponts en H
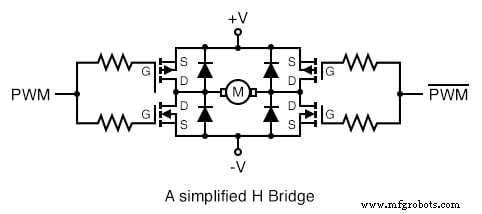
PWM est souvent utilisé en conjonction avec un pont en H. Cette configuration est ainsi nommée car elle ressemble à la lettre H et permet de doubler la tension effective aux bornes de la charge puisque l'alimentation peut être commutée des deux côtés de la charge. Dans le cas de charges inductives, telles que les moteurs, des diodes sont utilisées pour supprimer les pointes inductives, qui peuvent endommager les transistors. L'inductance dans un moteur a également tendance à rejeter la composante haute fréquence de la forme d'onde. Cette configuration peut également être utilisée avec des haut-parleurs pour amplis audio de classe D.
Bien qu'essentiellement précis, ce schéma d'un pont en H présente un grave défaut, il est possible, lors de la transition entre les MOSFET, que les deux transistors en haut et en bas soient allumés simultanément et subissent de plein fouet ce que l'alimentation peut fournir. Cette condition est appelée tirer à travers et peut arriver avec n'importe quel type de transistor utilisé dans un H-Bridge. Si l'alimentation est suffisamment puissante, les transistors ne survivront pas. Il est géré en utilisant des pilotes devant les transistors qui permettent à l'un de s'éteindre avant de permettre à l'autre de s'allumer.
Alimentation à découpage
Les alimentations à découpage (SMPS) peuvent également utiliser PWM, bien que d'autres méthodes existent également. L'ajout de topologies qui utilisent la puissance stockée à la fois dans les inductances et les condensateurs après les principaux composants de commutation peut augmenter l'efficacité de ces dispositifs de manière assez élevée, dépassant 90 % dans certains cas. Vous trouverez ci-dessous un exemple d'une telle configuration.
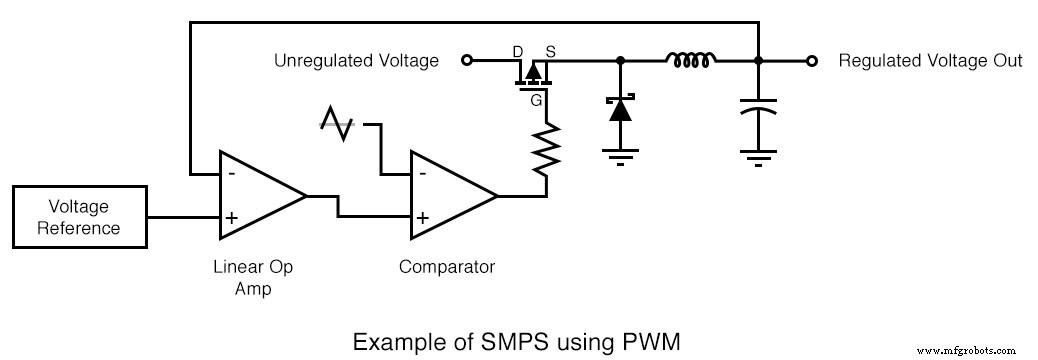
L'efficacité, dans ce cas, est mesurée en watts. Si vous avez un SMPS avec une efficacité de 90% et qu'il convertit 12VDC en 5VDC à 10 ampères, le côté 12V tirera environ 4,6 ampères. Les 10 % (5 watts) non comptabilisés apparaîtront comme de la chaleur résiduelle. Tout en étant légèrement plus bruyant, ce type de régulateur fonctionnera beaucoup plus froid que son homologue linéaire.
FICHES DE TRAVAIL CONNEXES :
- Projet de conception :Feuille de travail du générateur de signaux à modulation de largeur d'impulsion (PWM)
-
Feuille de travail sur la modulation du signal
Technologie industrielle