


IMU MEMS de nouvelle génération - Hautes performances, évolutives
Pour découvrir ce qui attend les systèmes de navigation automobile MEMS, j'ai interviewé Yang Zhao, PDG, et Teoman Ustun, vice-président du marketing et du développement commercial, ACEINNA, Inc. (Boston, MA).
Fiches techniques : Pourquoi appelez-vous ACEINNA IMU nouvelle génération ?
Yang Zhao : Dans des conditions idéales, vous pouvez naviguer dans une voiture avec une seule caméra. Mais pour atteindre la sécurité et la disponibilité à tout moment, les véhicules autonomes s'appuient de plus en plus sur des technologies de capteurs supplémentaires. Cependant, ces capteurs comme Vision, Radar, Lidar, GNSS, RTK peuvent tous être aveuglés dans certaines situations. L'IMU est le seul capteur qui continue à fonctionner même lorsque tous les autres capteurs échouent. Notre défi est d'augmenter la durée pendant laquelle l'estime avec l'IMU sera fiable. Le produit actuel que nous avons ressemble plus à un niveau industriel haut de gamme mais conçu pour être intégré aux cartes de passagers.
Téoman Ustun : La technologie MEMS révolutionnaire que nous développons atteindra les performances d'un gyroscope à fibre optique au prix d'une solution MEMS en silicium. Il s'agit essentiellement d'une technologie qui change la donne.
À chaque génération, nous améliorons les performances de notre IMU en termes de marche aléatoire angulaire (ARW), d'instabilité de polarisation et d'immunité aux vibrations/chocs. Avec cette dernière génération, nous avons également ajouté une architecture triple redondante, ce qui est extrêmement important pour deux raisons. Il améliore la fiabilité au niveau automobile et augmente également les performances de l'IMU. Par exemple, à ma connaissance, nous avons le seul INS (système de navigation inertielle) qualifié ASIL-B ISO 26262 (Automotive Safety Integrity Level) intégré avec IMU triple redondant sur le marché. Cette qualification donne essentiellement aux clients automobiles l'assurance que notre capteur générera des données de manière robuste tout au long de la durée de vie du véhicule.
Nos nouvelles IMU ont également des fonctionnalités d'architecture ouverte qui permettent à nos clients de tirer parti de leur savoir-faire ou d'implémenter leur sauce secrète dans notre matériel.
Zhao : Les IMU de qualité aérospatiale ont une excellente stabilité mais sont volumineuses, lourdes et coûteuses - voir la figure 1 pour une comparaison des différentes qualités d'IMU. Nous visons à mettre sur le marché un système IMU qui se rapprochera de la qualité de la navigation. Aujourd'hui, vous pouvez obtenir des IMU de qualité navigation, mais ils utilisent tous des gyroscopes à fibre optique et se situent dans la fourchette de prix de plusieurs dizaines de milliers de dollars. Ils sont gros, lourds et chers, mais dans l'avionique et l'armée, ce n'est pas un facteur décisif.
Mais quand vous parlez d'utiliser une IMU dans une voiture, personne ne paierait ce genre d'argent. Donc, ce que nous essayons de faire, c'est de développer une technologie MEMS IMU de nouvelle génération qui peut atteindre des performances de qualité navigation, qui peuvent approcher les niveaux de performance des gyroscopes à fibre optique. Contrairement à d'autres qui ciblaient initialement les IMU grand public et tentent maintenant de les déplacer vers des applications plus performantes, nous avons commencé par des applications industrielles hautes performances à l'esprit, pour définir les exigences de notre capteur automobile.
Les produits automobiles les plus récents que nous avons introduits sont rentables. Ils sont très bien conçus et développés de bas en haut pour avoir une optimisation prix/performance pour les applications à volume élevé. Nous visons un prix inférieur à 500 $ et éventuellement, encore moins.
Fiches techniques : Pourriez-vous expliquer certaines des fonctionnalités qui améliorent la précision, la stabilité et la fiabilité de votre nouvelle IMU.
Ustun : Tout d'abord, nos capteurs IMU ont une triple redondance - il y a trois accéléromètres et trois gyroscopes. Nous surveillons tous les paramètres critiques, y compris les tensions, les courants et les températures, ainsi que les performances des IMU individuelles. Cette triple redondance nous permet de mettre en place des autotests continus. Nous obtenons une bonne confiance sur les performances du gyroscope et de l'accéléromètre en comparant et en contrastant ce triple flux de données.

Nous avons également six degrés de liberté :les trois accéléromètres et les trois gyroscopes mesurent les axes XYZ. Les gyroscopes mesurent la vitesse de rotation qui, une fois intégrée, donne un changement de position angulaire. L'accéléromètre mesure l'accélération qui, lorsqu'elle est intégrée, donne la vitesse et, lorsqu'elle est à nouveau intégrée, donne la position. En traitant les données gyroscopiques et les données de l'accéléromètre, et en utilisant des filtres et des algorithmes optimisés pour une application donnée, nous obtenons des données angulaires vraiment précises pour le roulis, le tangage et le lacet (voir Figure 2). La donnée la plus critique pour une application automobile est le lacet, qui indique le degré de dérive de la voiture. L'inclinaison indique si vous montez ou descendez une pente. Avec un peu de chance, vous ne verrez jamais de rouleau dans votre voiture.
Fiches techniques : Quel type de précision pourriez-vous maintenir sur quelle période ?
Ustun : C'est très difficile à dire car cela dépend de tant de scénarios différents. Actuellement, nous devons atteindre une précision au niveau de la voie. Une voie mesure environ trois mètres de large et une voiture particulière environ deux mètres de large. Puisque vous voulez vous assurer que vous n'allez pas au-delà de la voie, vous avez environ plus ou moins un demi-mètre avant de dériver trop loin. À des vitesses automobiles typiques, une correction d'un demi-mètre pouvait être obtenue en moins d'une seconde. Étant donné que, à l'estime, vous pouvez conserver la précision requise pendant 60 à 90 secondes, notre IMU peut facilement maintenir une voiture dans sa voie.
Fiches techniques : Ainsi, une IMU vous donne une précision relative. Qu'en est-il de la précision absolue ?
Ustun : Les données de localisation absolue sont généralement dérivées d'un signal GNSS. Historiquement, la précision de positionnement des récepteurs GNSS était d'un mètre ou plus. Ainsi, le GNSS en lui-même n'est pas assez bon pour la précision requise au niveau de la voie automobile jusqu'à 2 cm.
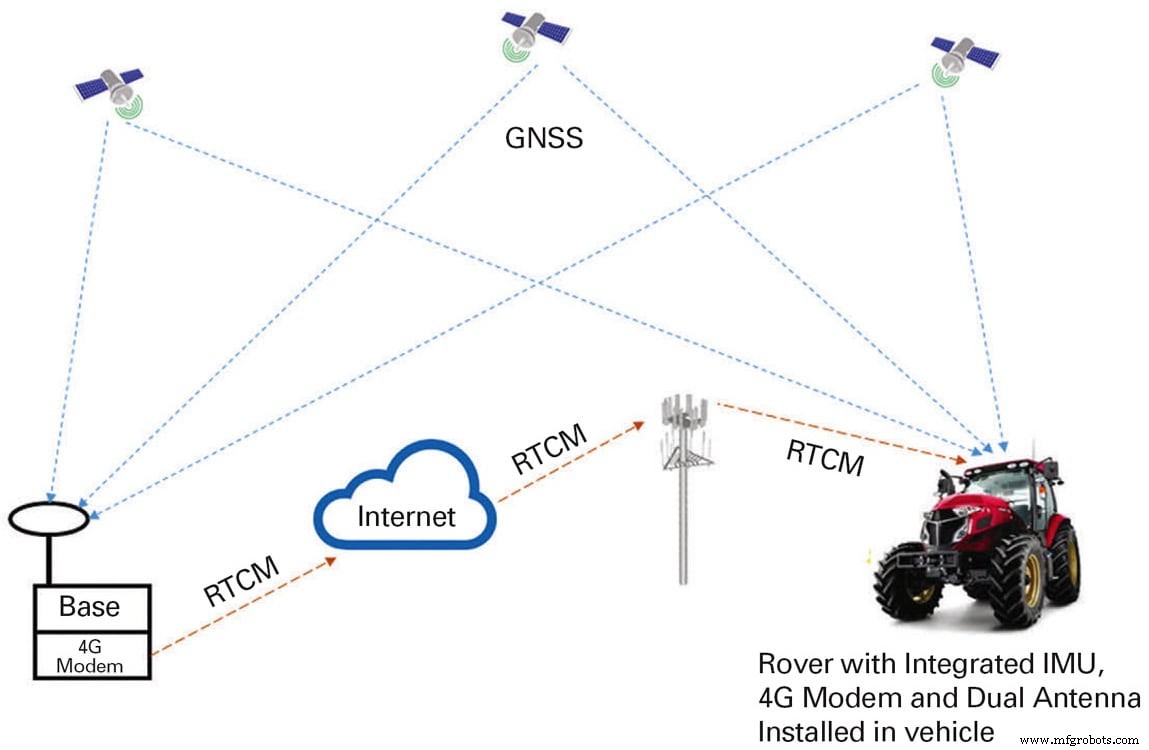
La cinématique en temps réel (RTK) est une technique permettant d'améliorer la précision de positionnement d'un récepteur GNSS. Il utilise un réseau de stations de base qui peuvent envoyer des corrections à notre moteur de positionnement RTK monté sur véhicule, qui les utilise pour recalculer sa position avec plus de précision.
RTK est un service que vous pouvez acheter ou souscrire auprès de nombreuses sources. Ce que nous voyons de plus en plus, c'est l'infrastructure de communication - même les fournisseurs de services de télécommunications comme Verizon, Softbank ou China Mobile - ont commencé à offrir des services RTK. Du point de vue de notre produit, nous sommes indépendants du fournisseur de services - nous avons l'intention de prendre en charge chacun de ces fournisseurs de services RTK pour aider nos clients à atteindre les limites de précision qu'ils recherchent. Nous proposons une solution à la fois matérielle et logicielle.
Bien que nous ne fournissions pas le service, nous permettons à nos clients de choisir celui qui leur convient le mieux. Cependant, nous qualifions d'abord ces services. Nous nous assurons qu'ils sont compatibles avec notre matériel et nos logiciels. Ensuite, nous l'affichons sur notre site Web pour donner aux clients la possibilité de choisir parmi une liste de fournisseurs de services. Le plus souvent, RTK est un service sur un réseau 4G LTE. S'il n'y a pas de réception 4G LTE, il existe d'autres moyens de recevoir les signaux de correction, comme la communication par satellite.
Pour RTK, vous placez des stations de base sur un réseau :en règle générale, vous placez des stations de base dans un rayon de 50 miles. Ces stations de base sont positionnées de manière à ce que leurs emplacements soient connus de manière très précise. Les corrections sont générées en mesurant l'erreur entre le signal GNSS et l'emplacement connu avec précision d'une station de base.
Nous avons donc une solution complète :un système de navigation inertielle qui comprend notre triple IMU haute performance à six degrés de liberté couplée à un récepteur GNSS à double fréquence, dans deux facteurs de forme différents. L'un est un facteur de forme de module. Si le client souhaite redistribuer cela dans sa propre unité de commande du moteur (ECU), il peut le faire, ou sinon, il peut utiliser notre solution prête à l'emploi prête à l'emploi. Fondamentalement, il vous suffit de connecter l'antenne GPS/GNSS et le système fonctionnera sur le bus CAN ou Ethernet.
Cet article a été rédigé par Ed Brown, rédacteur en chef de Sensor Technology. Pour plus d'informations, rendez-vous ici .
Capteur
- VersaLogic lance un ordinateur embarqué hautes performances basé sur Xeon
- L'unité commerciale Matériaux Haute Performance de Lanxess devient juridiquement indépendante
- Technologie HDPE haute barrière contre l'humidité pour les emballages flexibles multicouches
- Étiquetage dans le moule :hautes performances à moindre coût
- Dispal S220 F en alliage d'aluminium haute performance formé par pulvérisation
- Dispal S220 O en alliage d'aluminium haute performance formé par pulvérisation
- Dispal S225 F en alliage d'aluminium haute performance formé par pulvérisation
- Dispal S232 T6 en alliage d'aluminium haute performance formé par pulvérisation
- Dispal S232 T6x en alliage d'aluminium haute performance formé par pulvérisation