


Détection de position à effet Hall :Linéarité et pente de réponse pour les configurations de glissement
Découvrez comment diverses décisions concernant les solutions de détection à effet Hall, en particulier pour les configurations coulissantes, peuvent affecter vos conceptions.
Les capteurs à effet Hall permettent des solutions efficaces pour la détection de position. Avec les capteurs à effet Hall, il n'y a pas de connexion mécanique entre le capteur et la pièce mobile, et, par conséquent, une fiabilité et une durabilité plus élevées peuvent être obtenues.
Il existe plusieurs configurations différentes aimant-capteur qui peuvent être utilisées dans les applications de détection de position basées sur l'effet Hall. Dans cet article, nous examinerons une configuration magnétique coulissante qui peut produire une courbe linéaire de Gauss en fonction de la distance. Nous verrons également qu'il est possible d'utiliser une combinaison d'aimants pour ajuster la pente de la courbe de Gauss en fonction de la distance.
La linéarité peut être un facteur de décision
Dans un article précédent, nous avons examiné les configurations simples de front et de slide-by. Ces deux dispositions sont illustrées à la figure 1.
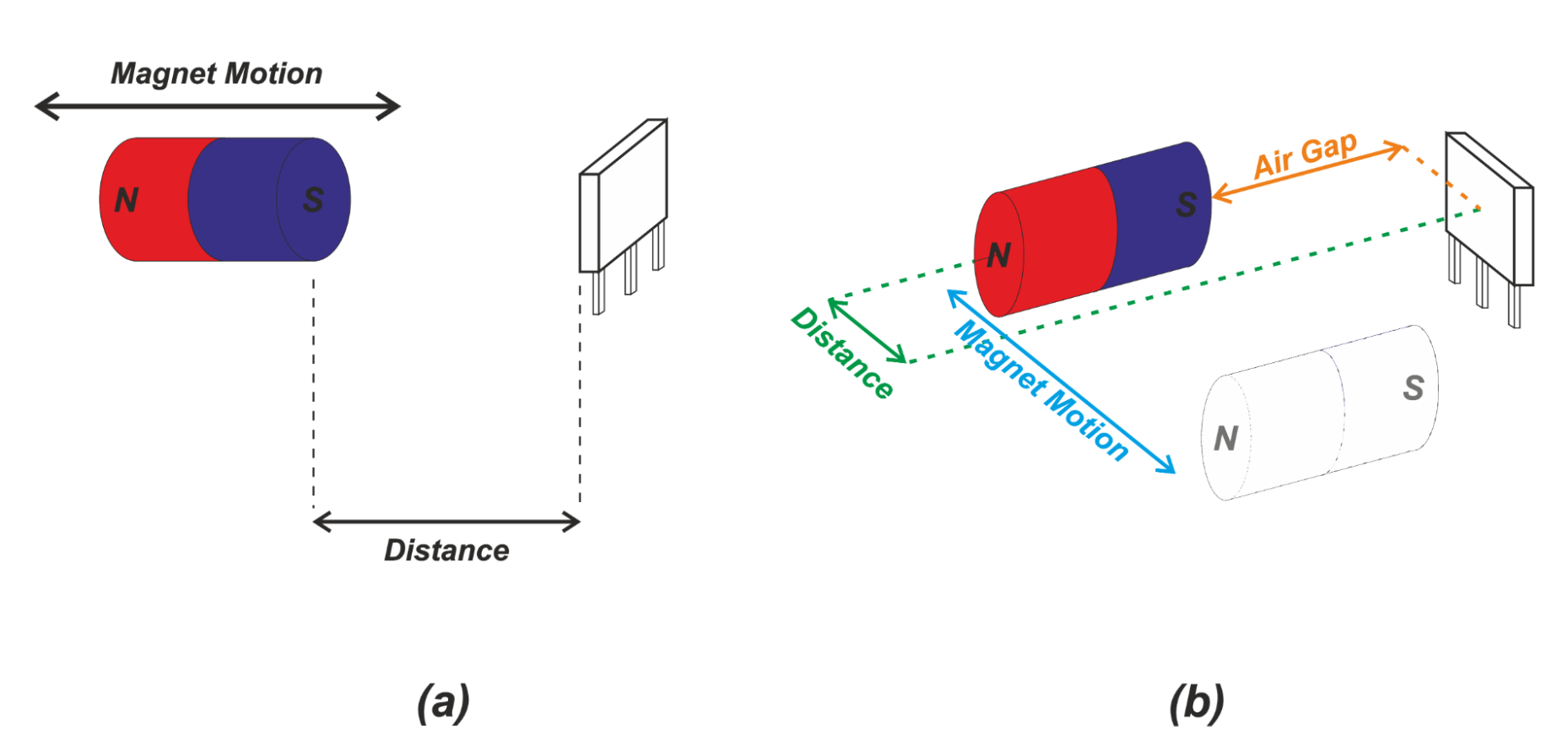
Figure 1 (a). De front et (b) détection de glissement.
Nous avons vu que la relation entre le champ détecté et la distance n'est pas linéaire avec les dispositions ci-dessus. Ces configurations aimant-capteur sont généralement utilisées comme détecteurs de proximité dans des applications où les exigences de précision ne sont pas très exigeantes.
Cependant, lorsqu'un contrôle précis de la position le long de la course de détection est requis, nous préférons avoir une relation linéaire entre la sortie du capteur et le déplacement. En fait, bien que nous puissions utiliser un logiciel pour supprimer les erreurs de linéarité du capteur, avoir une réponse linéaire est souhaitable car cela augmente la précision de la mesure et facilite l'étalonnage du système.
Détection de glissement linéaire
La figure 2(a) montre un agencement coulissant qui présente une relation linéaire entre la composante z du champ magnétique détecté et le déplacement de l'aimant. La figure 2(b) montre la densité de flux magnétique (dans la direction de l'axe z) par rapport à la course de l'aimant.
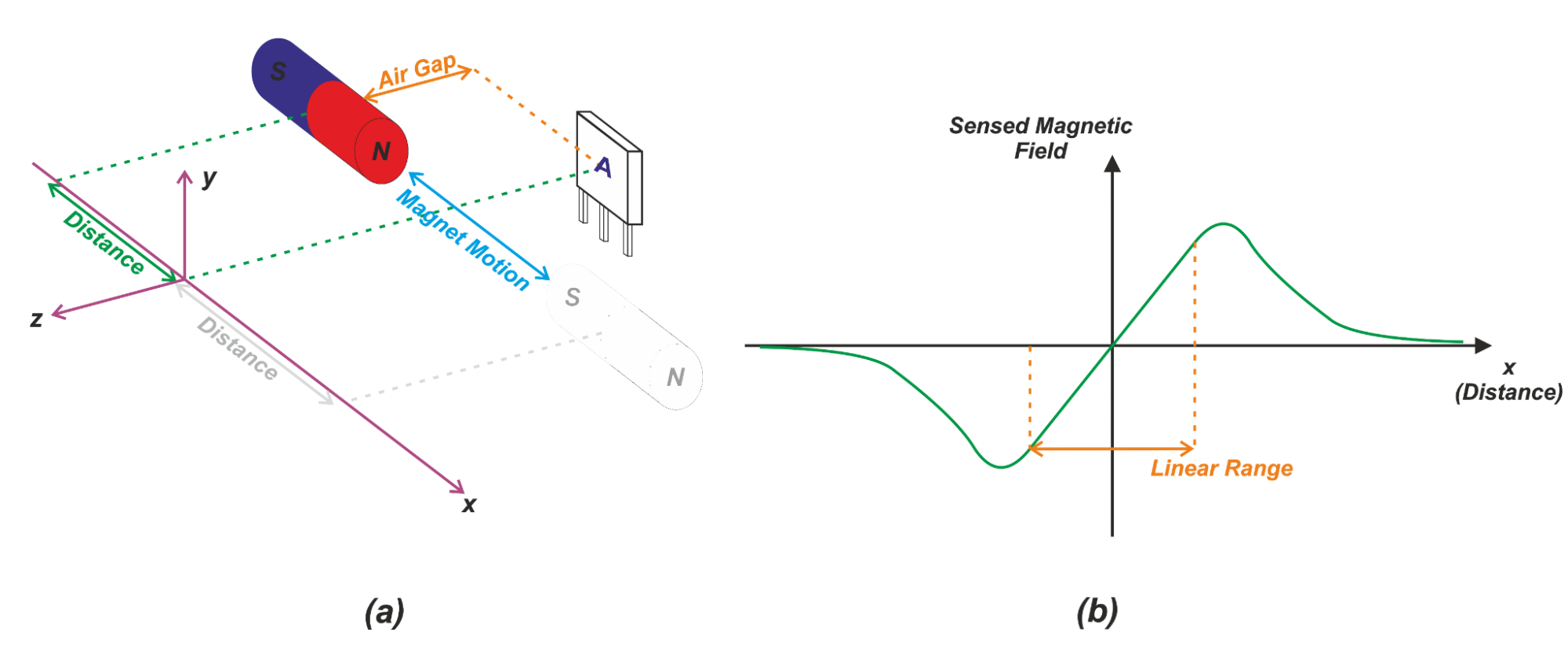
Figure 2 (a). Une configuration coulissante avec réponse linéaire (b) densité de flux magnétique en fonction de la position de l'aimant
Lorsque l'aimant est sur le côté gauche du capteur (x<0), les lignes de champ magnétique de l'aimant produisent une composante dans la direction opposée à l'axe z. Notez que les lignes de champ vont du pôle nord au pôle sud de l'aimant.
La figure 3 montre l'une des lignes de champ traversant le capteur.
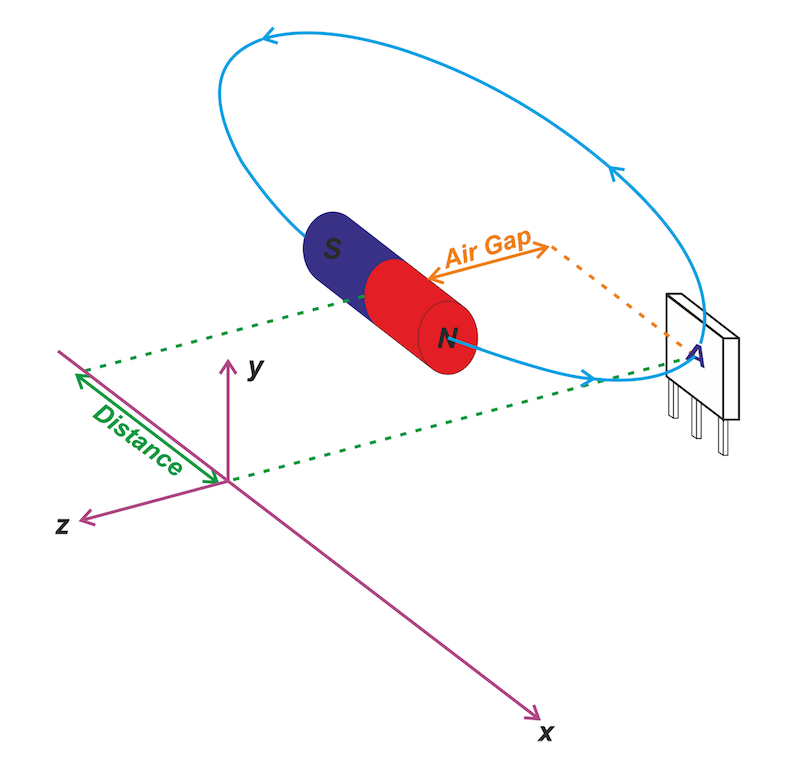
Figure 3. Direction des lignes de champ magnétique à travers un capteur à effet Hall
Par conséquent, pour x<0, la composante z du champ magnétique détecté est négative. Lorsque l'aimant atteint la position centrale, le champ dans la direction z sera nul. Pour un déplacement positif (x>0), le champ magnétique produira une composante dans la direction de l'axe z (champ magnétique positif). Pour des déplacements importants dans les deux sens, un plus petit nombre de lignes de champ peuvent traverser le capteur. Par conséquent, le champ magnétique détecté par le capteur diminue.
L'une des principales caractéristiques de cet arrangement est que la composante z du champ magnétique présente une relation linéaire avec le déplacement autour de l'origine. Cette plage linéaire est représentée sur la figure 2(b). La longueur de la région linéaire est légèrement inférieure à la longueur de l'aimant. Par exemple, avec un aimant de 22 mm, la zone linéaire peut s'étendre d'environ -10 mm à +10 mm. Ce comportement linéaire nous permet de détecter plus facilement et plus précisément la position d'un objet en mouvement.
Et si nous avons besoin d'une plage linéaire plus large ?
Nous pouvons utiliser un aimant plus long pour augmenter la plage linéaire de la configuration ci-dessus; cependant, certaines applications ne peuvent pas accueillir un grand aimant dans le système. De plus, avec des aimants longs, le coût peut être un facteur limitant. Si une course plus longue que la longueur de l'aimant doit être détectée, nous pouvons utiliser un réseau de capteurs pour étendre la plage de mesure. Ceci est illustré à la figure 4.
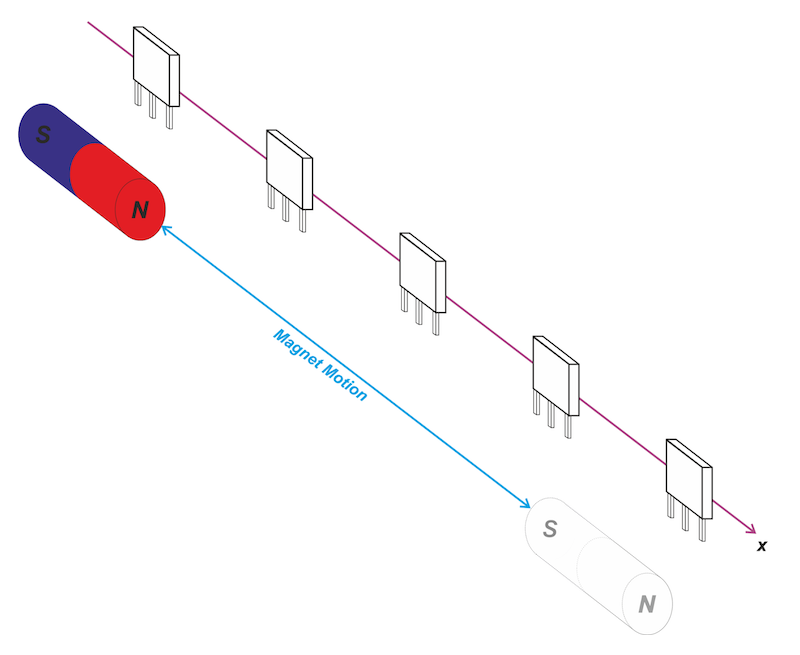
Figure 4. Utilisation de plusieurs capteurs à effet Hall pour une plage linéaire accrue
Dans ce cas, nous devons traiter les données de plusieurs capteurs pour trouver la position de l'objet. Pour plus de détails, veuillez vous référer à cette note d'application TI.
Détection de la présence d'un objet
La configuration coulissante de la figure 2 peut également être utilisée pour détecter la présence d'un objet (plutôt que de déterminer la position de l'objet sur sa course). Supposons que dans l'exemple illustré à la figure 2(a), l'aimant se déplace parallèlement à l'axe x de gauche à droite. Supposons que les points de fonctionnement et de déclenchement magnétiques de notre capteur à effet Hall numérique (ON/OFF) soient comme indiqué sur la figure 5.
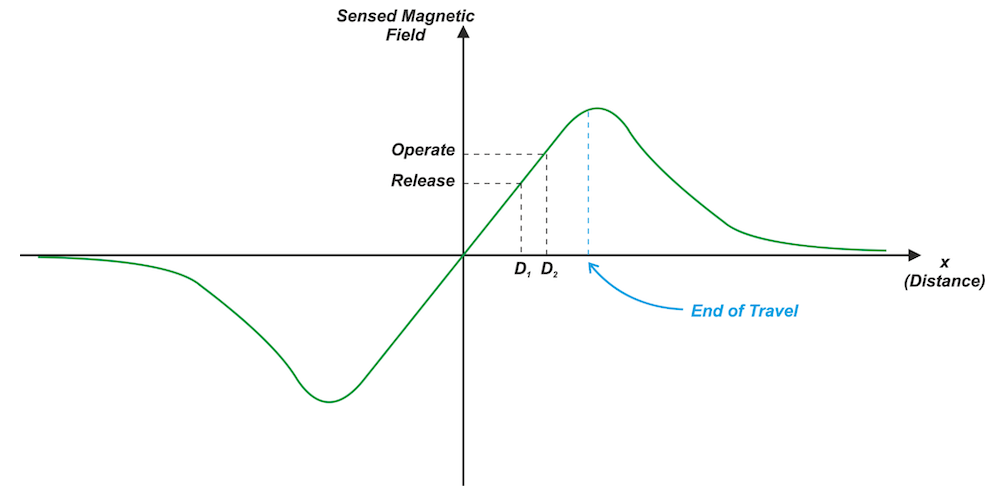
Figure 5. Utilisation d'une configuration coulissante pour la détection ON/OFF
Au fur et à mesure que l'aimant s'approche du capteur de gauche à droite, l'intensité du champ magnétique devient de plus en plus grande. À D2, le champ magnétique détecté est égal au point de fonctionnement magnétique qui active le capteur. Rapprocher l'aimant du capteur entraîne un champ magnétique encore plus grand et maintient le capteur allumé.
Maintenant, si on déplace le capteur dans le sens inverse (de droite à gauche), le champ magnétique diminue. A D1, le champ magnétique devient plus petit que le point de déclenchement qui éteint le capteur. Cela nous permet de détecter la présence de l'objet. Nous pouvons également utiliser cette structure pour définir un point de référence (le point de commutation du capteur) dans la course de l'objet.
Selon la courbe de densité de flux magnétique en fonction de la distance de la figure 5, une densité de flux magnétique donnée peut être produite par deux déplacements différents. C'est pourquoi la disposition ci-dessus est généralement utilisée dans les applications où la structure mécanique limite la fin de course de l'objet de manière à ce que la commutation du capteur ne puisse se produire qu'à un déplacement particulier. Cela évite toute ambiguïté dans l'interprétation des résultats.
Augmentation du gradient de la courbe de Gauss en fonction de la distance
Nous avons expliqué ci-dessus qu'un capteur à effet Hall numérique (ON/OFF) peut être utilisé avec la configuration coulissante pour définir un point de référence dans la course de l'objet. Si nous pouvions augmenter la pente de la courbe de Gauss en fonction de la distance, nous pourrions détecter le point de référence avec plus de précision.
Avec une pente plus importante, un déplacement donné entraîne une variation plus importante de l'intensité du champ magnétique qui peut être plus facilement détectée par le capteur. La figure 6(a) montre un système magnétique qui présente une pente plus grande que celle de la configuration de la figure 2(a).
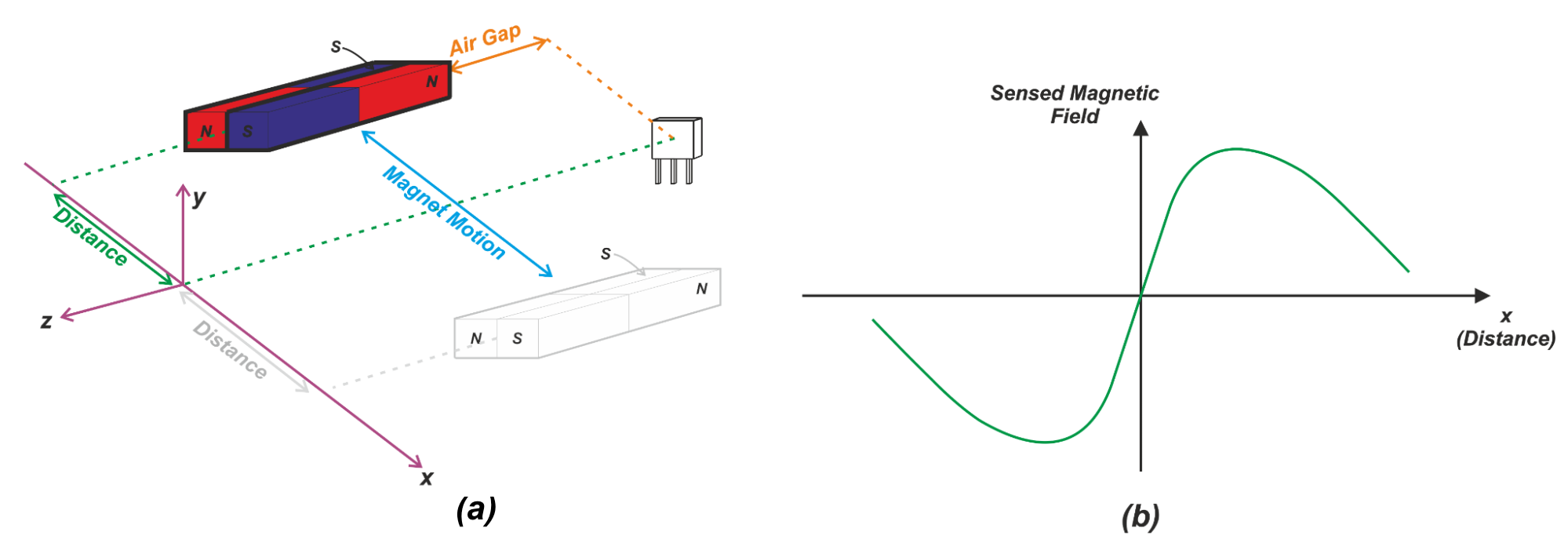
Figure 6. Utilisation de plusieurs aimants pour augmenter la résolution de l'intensité du champ
Dans ce cas, les pôles nord et sud d'une paire d'aimants sont déplacés par rapport au capteur. Le champ global est déterminé par les lignes de champ des deux aimants. Dans cet agencement, la distance est mesurée par rapport au centre de la paire d'aimants. La figure 6(b) montre la composante z du champ magnétique détecté en fonction de la distance. À la position centrale (x=0), le nombre de lignes de champ du pôle nord d'un aimant qui traverse le capteur est égal au nombre de lignes de champ du pôle sud de l'autre aimant. Par conséquent, la densité de flux magnétique nette est nulle.
Supposons que nous déplacions l'aimant vers la droite à partir de la position centrale (x>0). Cela augmente brusquement le nombre de lignes de champ du pôle sud et crée un champ magnétique avec une composante z positive. De même, lorsque nous déplaçons l'aimant vers la gauche à partir de la position centrale (x<0), nous obtenons un champ magnétique relativement fort avec une composante z négative. Autour de l'origine, le gradient de la courbe est plus élevé que celui de la configuration de glissement de la figure 2(a) car la transition des pôles nord aux pôles sud se produit brusquement. Cette pente relativement plus grande de la courbe de Gauss en fonction de la distance peut nous aider à définir la position de référence d'un objet en mouvement avec plus de précision.
Il existe deux autres variantes intéressantes de cette configuration coulissante. Une version sépare les deux aimants par une petite distance fixe. Cela nous permet d'avoir une transition moins abrupte des pôles nord aux pôles sud et donc d'ajuster la pente de la réponse autour de l'origine. Une autre version utilise une combinaison de trois aimants. Cela peut créer une réponse symétrique avec de grandes pentes dans les deux sens. Une réponse symétrique peut être utile lors de la détection d'un écart par rapport à une ligne centrale. Pour en savoir plus sur ces deux configurations, veuillez vous reporter au manuel « Hall Effect Sensing and Applications » de Honeywell.
Pour voir une liste complète de mes articles, veuillez visiter cette page.
Capteur
- Future Electronics :plate-forme de développement rapide pour l'imagerie thermique et la détection infrarouge
- ADI :impédance &potentiostat AFE pour la détection biologique et chimique
- Infineon lance un capteur Hall linéaire intégré monolithiquement pour les systèmes ASIL D
- Ambarella, Lumentum et ON Semiconductor collaborent sur la détection 3D basée sur le traitement de l'IA pour les appareils AIoT de nouvelle génération
- Matériaux autorégénérants à détection douce pour mains et bras robotiques
- Table ronde de la direction :Détection et IIoT
- Dispositifs photoniques à base de graphène pour la télédétection
- Connexions pour le contrôle :interfaces de communication pour les capteurs de position et de mouvement
- Détection des champs magnétiques