


Conception magnétique à effet Hall :configurations frontales et coulissantes
Découvrez comment l'effet Hall est utilisé dans les applications de détection de position.
La détection de position est l'une des applications les plus importantes des capteurs à effet Hall. Un dispositif à effet Hall détecte la force du champ magnétique appliqué. Pour détecter la position d'un objet, nous pouvons apposer un petit aimant permanent sur l'objet. Lorsque l'objet déplace l'aimant par rapport au dispositif Hall, la force du champ magnétique change. Ces changements peuvent être traités par le système pour détecter la position de l'objet.
Il existe plusieurs configurations capteur-aimant différentes qui peuvent être utilisées dans les applications de détection de position basées sur l'effet Hall. A chaque configuration capteur-aimant, l'aimant est déplacé par rapport au capteur de manière différente. Cela affecte le champ magnétique détecté par le dispositif Hall et modifie les caractéristiques du système.
Dans cet article, nous examinerons certaines des configurations magnétiques de base utilisées dans la détection de position par effet Hall et discuterons de leurs avantages et inconvénients.
Configuration frontale
La configuration magnétique la plus simple est la détection frontale illustrée à la figure 1.
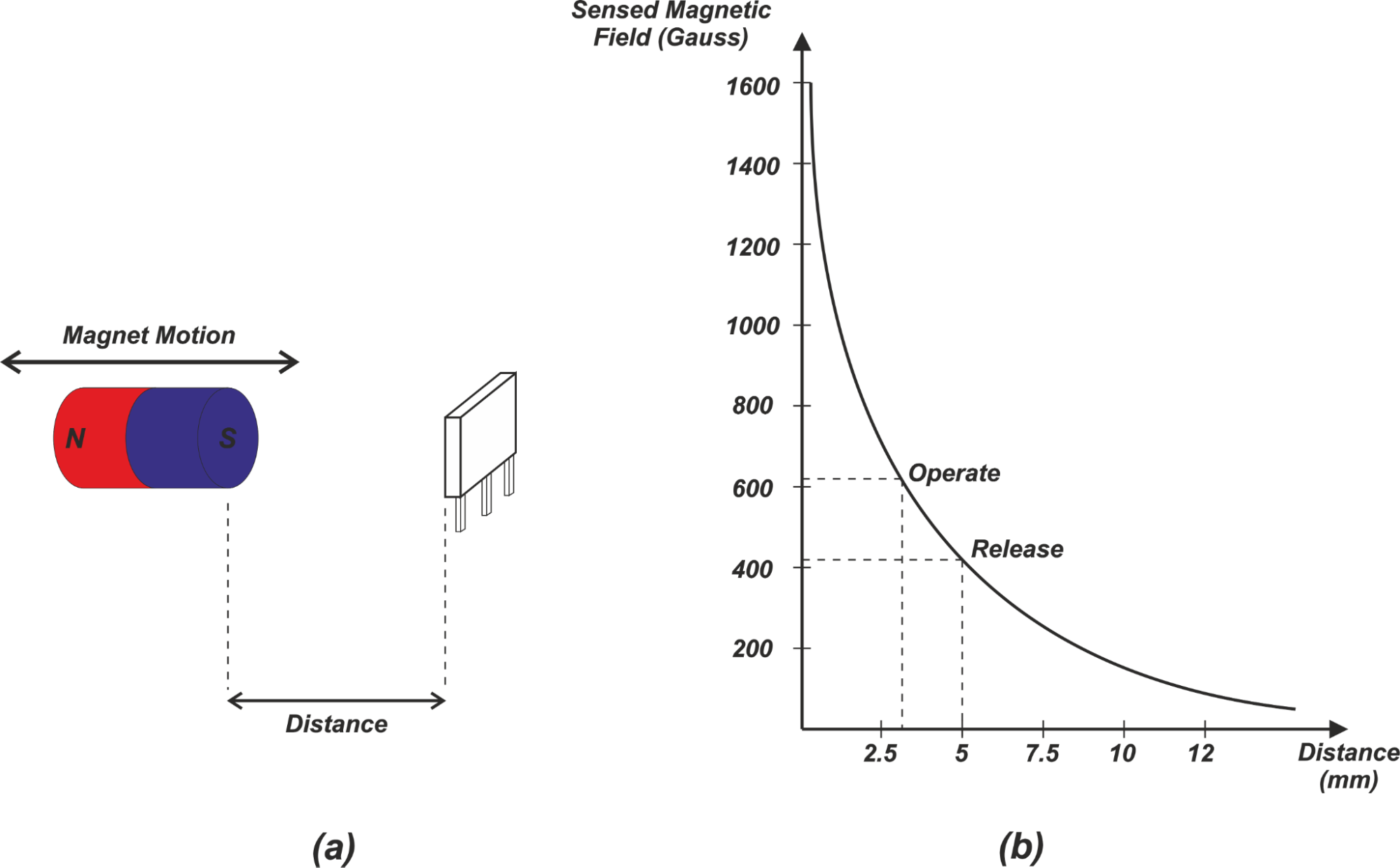
Figure 1.
Dans ce cas, le pôle sud de l'aimant est déplacé directement vers ou loin du capteur. Lorsque l'aimant est très proche du capteur, un plus grand nombre de lignes de flux magnétiques traversent la face de détection du capteur. Cependant, à mesure que le pôle sud de l'aimant s'éloigne du capteur, l'intensité du champ magnétique diminue rapidement, comme le montre la figure 1(b).
Notez que la courbe de Gauss en fonction de la distance est parfois appelée carte de flux de la structure. La densité de flux magnétique de la configuration frontale est inversement proportionnelle au carré de la distance entre l'aimant et le capteur. Les valeurs de flux indiquées dans la figure 1(b) peuvent être produites par un aimant d'environ 30 mm de long et d'environ 6 mm de diamètre.
Application :Détection de la présence d'un objet
La configuration frontale peut être utilisée avec un capteur à effet Hall numérique (ON/OFF) pour détecter la présence d'un objet. Supposons que les points de fonctionnement et de déclenchement magnétiques du capteur soient tels qu'illustrés à la figure 1(b). Le point de fonctionnement magnétique spécifie le niveau d'un champ magnétique de renforcement auquel un dispositif Hall s'allume. Le point de déclenchement magnétique correspond à l'affaiblissement du champ magnétique auquel le dispositif Hall s'éteint.
Au fur et à mesure que l'aimant s'approche du capteur, l'intensité du champ magnétique devient de plus en plus grande. À une distance d'environ 3,1 mm, le champ magnétique détecté est égal au point de fonctionnement magnétique (environ 620 Gauss dans notre exemple) qui allume le capteur. Le fait de rapprocher l'aimant du capteur entraîne un champ magnétique encore plus grand et maintient le capteur allumé. Lorsque le capteur s'éloigne de l'aimant, le champ magnétique diminue.
Cependant, tant que le champ magnétique n'est pas inférieur au point de déclenchement (environ 420 Gauss dans notre exemple), le capteur reste allumé. Ce n'est que lorsque le champ magnétique descend en dessous du point de déclenchement que l'appareil s'éteint. De cette façon, nous pouvons détecter la présence d'un objet.
Limites de la détection frontale
Cette configuration est moins précise notamment au niveau de la distance qui fait que le capteur s'éteint. Cela est dû au fait que la pente de la carte de flux (la courbe de Gauss en fonction de la distance) est plus petite autour du point de rejet. Une variation donnée de la valeur du point de déclenchement magnétique peut conduire à une variation relativement importante de la valeur de la distance à laquelle le capteur s'éteint. La même variation du point de fonctionnement magnétique conduit à une variation de distance plus faible. Ceci est illustré à la figure 2.
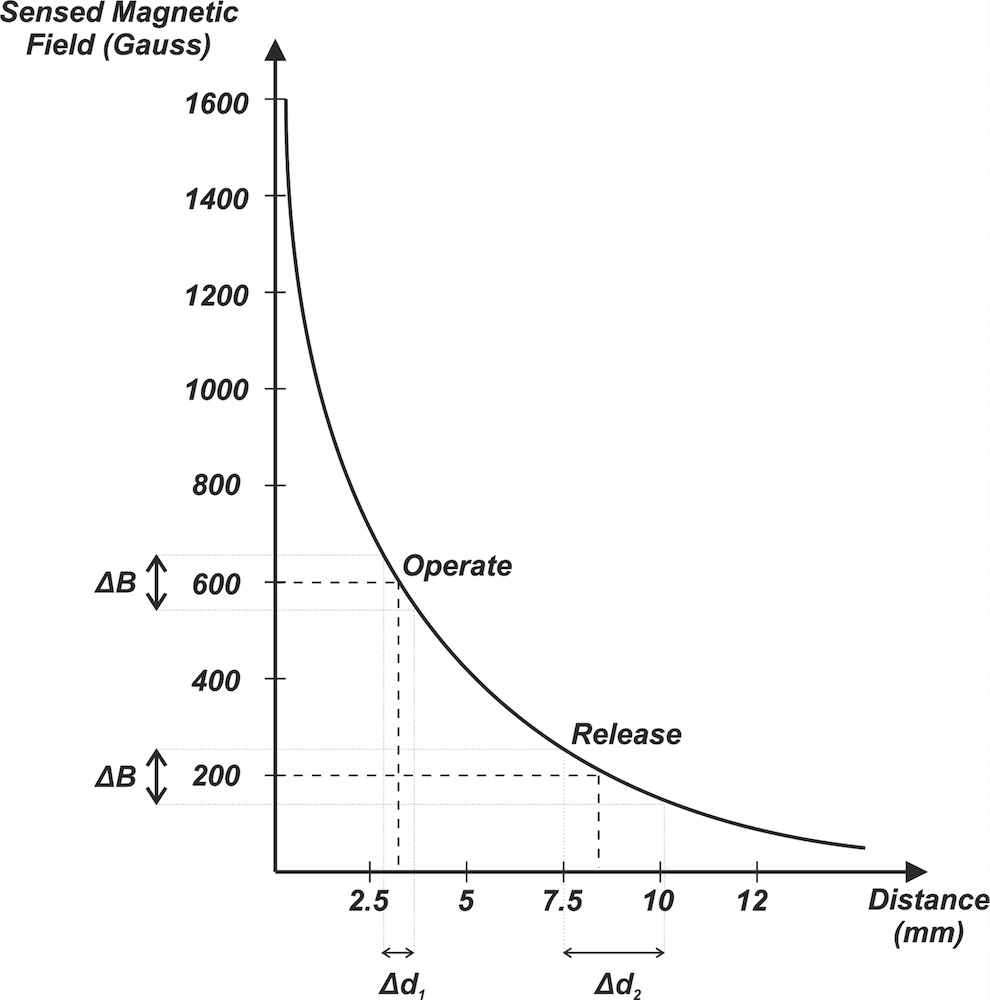
Figure 2
Supposons que la variation d'unité à unité des points de fonctionnement et de libération soit ΔB pour un capteur hypothétique, comme illustré à la figure 2. Étant donné que la courbe a une pente plus importante au point de fonctionnement magnétique, Δd1 est beaucoup plus petit que Δd2 . Par conséquent, la distance correspondant au point de fonctionnement magnétique sera plus cohérente entre les différentes cartes.
Un autre inconvénient est que la détection frontale ne peut pas être utilisée pour détecter de grandes plages de déplacement car les lignes de champ magnétique se dégradent très rapidement. De plus, avec une configuration frontale, la relation entre le champ détecté et la distance est non linéaire. Cela rend difficile la détection d'un mouvement de course longue lorsqu'une mesure de position linéaire est requise. En raison de ces limitations, la détection frontale est généralement utilisée comme détecteur de proximité dans les applications où les exigences de précision ne sont pas très exigeantes.
Détection unipolaire par glissement
Dans cet agencement, un pôle unique de l'aimant se déplace latéralement devant la face de détection du capteur. Ceci est illustré à la figure 3(a).
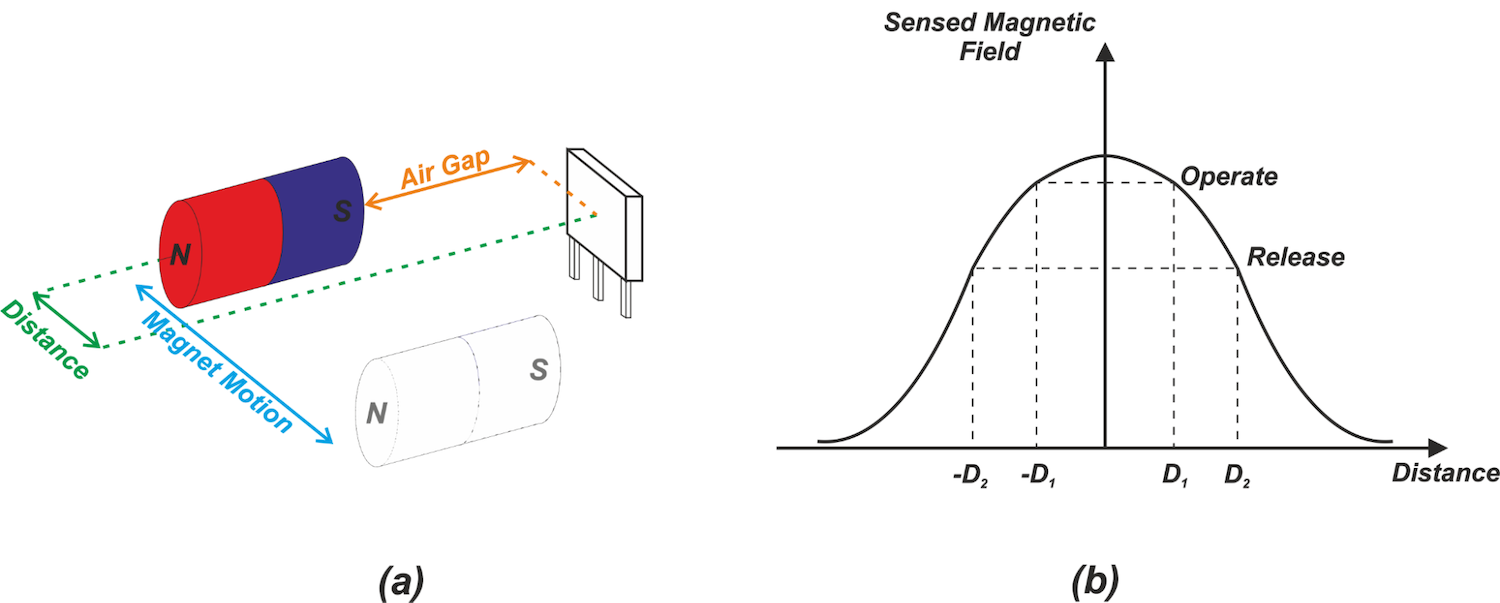
Figure 3
Le pôle de l'aimant est à une distance perpendiculaire constante (indiquée par « l'entrefer » sur la figure) lorsqu'il passe devant le capteur. A la position centrale (distance=0), le champ magnétique détecté est à son maximum. Au fur et à mesure que l'aimant s'éloigne du capteur, le champ magnétique diminue. Étant donné que le champ magnétique produit par l'aimant est symétrique, la carte de flux est symétrique autour de l'origine, comme le montre la figure 3(b).
La valeur de crête de la carte de flux change avec la valeur de « l'entrefer » comme le montre la figure 4.
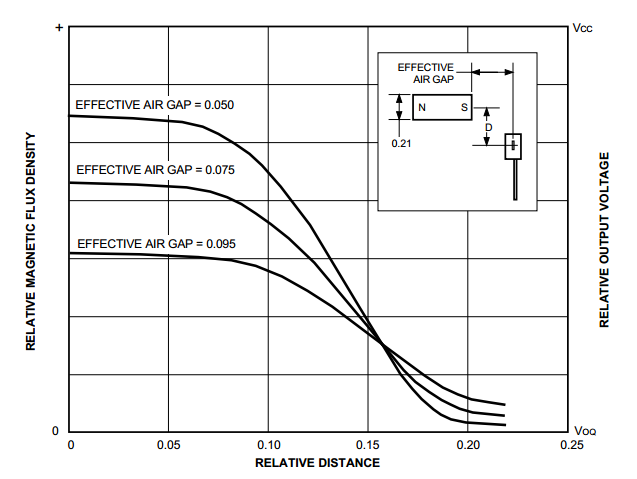
Figure 4. Image reproduite avec l'aimable autorisation d'Allegro.
Configuration frontale ou coulissante ?
Il est important de noter que le choix de la configuration magnétique dépend du type de mouvement détecté. Chaque système peut avoir un ensemble différent de limitations et de caractéristiques mécaniques. Par exemple, avec la configuration frontale, l'objet ne peut pas dépasser le capteur. Cette disposition convient aux applications où l'objet détecté a une position finale définie et nous sommes intéressés par la détection de la présence/absence de l'objet à ce point final.
Par exemple, la détection frontale peut être un bon choix pour détecter si le couvercle d'un couvercle de smartphone est ouvert ou fermé. La détection de glissement n'a pas cette limitation ; il peut être utilisé peu importe si l'objet passe devant le capteur ou non.
Une caractéristique intéressante de la configuration coulissante est sa symétrie. Étant donné que la courbe de Gauss en fonction de la distance de cette structure est symétrique autour de l'origine, les points de fonctionnement et de libération ne dépendent pas du fait que nous nous rapprochons ou nous éloignions du capteur. Cela peut être utile lors de la détection d'un écart par rapport à une ligne médiane.
Notez qu'il existe d'autres configurations coulissantes dont certaines ne fournissent pas de réponse symétrique. Dans le prochain article, nous examinerons des configurations magnétiques plus sophistiquées qui sont couramment utilisées dans les applications de détection de position à effet Hall.
Pour voir une liste complète de mes articles, veuillez visiter cette page.
Capteur
- Capteur de pression artérielle - Fonctionnement et ses applications
- Fonctionnement du capteur de tension et ses applications
- Capteur RVG – Principe de fonctionnement et ses applications
- Sonde Lambda – Fonctionnement et ses applications
- Fonctionnement du capteur d'image et ses applications
- Capteur de couleur – Fonctionnement et applications
- Capteur Arduino - Types et applications
- Capteur de boussole – Fonctionnement et applications
- Comprendre le capteur à effet Hall