


Intégration ROS2 + DDS :quand les écosystèmes fusionnent | RTI

Comme annoncé en juillet 2018, la deuxième version de ROS2 - surnommé "Bouncy Bolson" - est désormais disponible en téléchargement sur le site Web de ROS2 pour les plates-formes Intel Linux, Windows et iOS.
Si cela ne vous semble pas familier, ROS (Robot Operating System) est un framework open source et une suite d'outils pour la construction de systèmes robotiques, et il se décline en deux versions principales :ROS - l'original version de recherche utilisant Python et XML, et ROS2 - une version aux performances améliorées qui utilise DDS comme cadre de connectivité.
À propos de ROS2 Bouncy Bolson
La version ‘Bouncy’ est spéciale car elle inclut RTI Connext DDS dans la distribution binaire sous une licence non commerciale. Le DDS de qualité professionnelle est désormais une option gratuite pour les chercheurs, les évaluateurs et les universitaires utilisant ROS2 pour les applications robotiques.
Cela signifie que l'écosystème d'outils et de services DDS est disponible pour tous les utilisateurs de ROS2, grâce à l'interopérabilité basée sur les normes inhérente à DDS, notamment :
- Console d'administration RTI :l'outil incontournable pour diagnostiquer les problèmes de connectivité du système.
- RTI System Monitor :le meilleur outil pour régler et optimiser les performances du système.
- Service d'enregistrement RTI : enregistrement à large bande passante et longue durée et lecture des données de sujet à partir de votre système.
- Service de routage RTI : une solution prête à l'emploi qui agit comme un pont/une passerelle architecturale.
Voyons comment la console d'administration RTI peut faciliter le diagnostic et la compréhension des problèmes de connectivité ROS2. J'ai récemment mis en place une source de données LiDAR pour ROS2, et ma première tentative d'affichage des données à l'aide de RViz a abouti à :aucune donnée. Le terminal pour RViz ne produisait pas beaucoup de messages utiles :

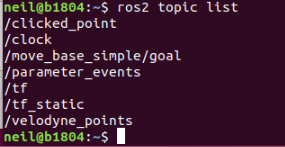 Je suis intéressé par le sujet « /velodyne_points » :
Je suis intéressé par le sujet « /velodyne_points » : L'éditeur de « /velodyne_points » produit-il des données ? :
L'éditeur de « /velodyne_points » produit-il des données ? :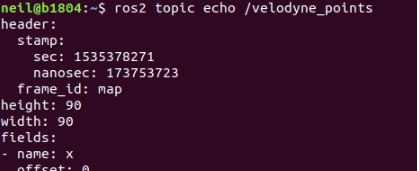 Oui . . . alors pourquoi les données ne sont-elles pas affichées par RViz ?
Oui . . . alors pourquoi les données ne sont-elles pas affichées par RViz ? Console d'administration
Essayons de diagnostiquer ce problème à l'aide de la console d'administration RTI, qui est facilement disponible dans le lanceur RTI :

Dès le lancement de la console d'administration, elle m'informe qu'il y a un problème parmi les participants au réseau DDS (notez l'indicateur de la boîte X rouge) :
 Développer le « domaine 0 » et mettre en évidence mon sujet d'intérêt (/velodyne_points) montre immédiatement la cause du problème - une incompatibilité de QoS :
Développer le « domaine 0 » et mettre en évidence mon sujet d'intérêt (/velodyne_points) montre immédiatement la cause du problème - une incompatibilité de QoS :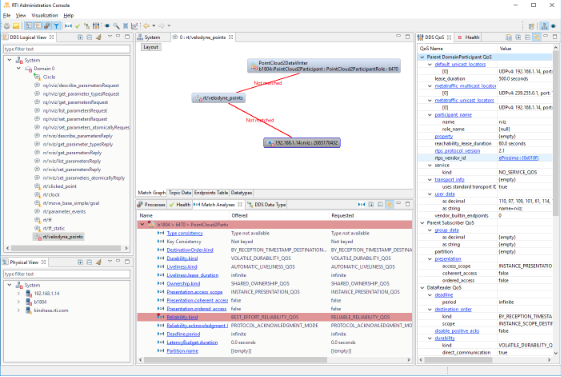 Mon éditeur propose une fiabilité « Best Effort », mais l'abonné RViz a besoin une connexion « Fiable ». Plutôt que de permettre à cette incompatibilité de continuer, DDS refuse la connexion et empêche la non-concordance de continuer à passer inaperçue.
Mon éditeur propose une fiabilité « Best Effort », mais l'abonné RViz a besoin une connexion « Fiable ». Plutôt que de permettre à cette incompatibilité de continuer, DDS refuse la connexion et empêche la non-concordance de continuer à passer inaperçue.Cette incompatibilité de QoS a été immédiatement révélée par la console d'administration, avec les détails de tous les autres participants de ce réseau DDS ROS2, y compris tous les sujets internes normalement cachés de ROS2. En un coup d'œil, je peux déterminer que :
- Il y a quelques entrées de journal d'erreurs - nous les examinerons plus tard.
- Il existe un certain nombre de sujets « Rédacteur uniquement » et « Lecteur uniquement ». Ce sont des sujets qui peuvent publier ou s'abonner à un sujet, mais qui n'ont pas d'abonné ou d'éditeur complémentaire pour le moment.
- Ce système exécute un mélange de couches RMW de différents fournisseurs DDS. Ce n'est pas un problème. DDS a été conçu pour l'interopérabilité multi-fournisseurs.
- Lors de l'exécution avec la couche Connext RMW, les informations de code de type sont incluses dans le trafic de découverte DDS et peuvent être facilement consultées dans la console d'administration :
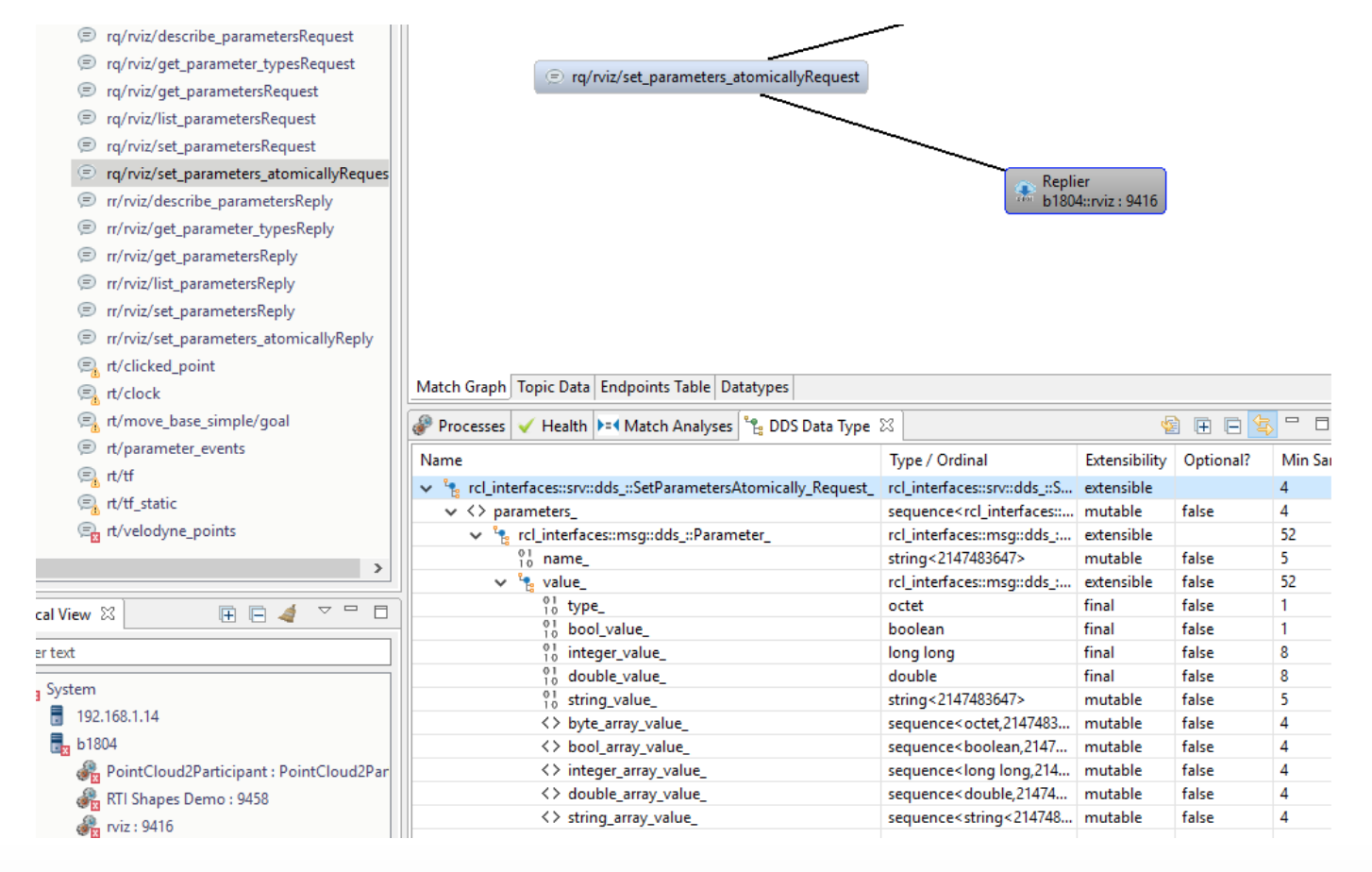
Lors de l'utilisation d'autres calques RMW, ces informations sont supprimées.
La console d'administration peut également s'abonner à des sujets de données et imprimer ou visualiser leurs valeurs de données :
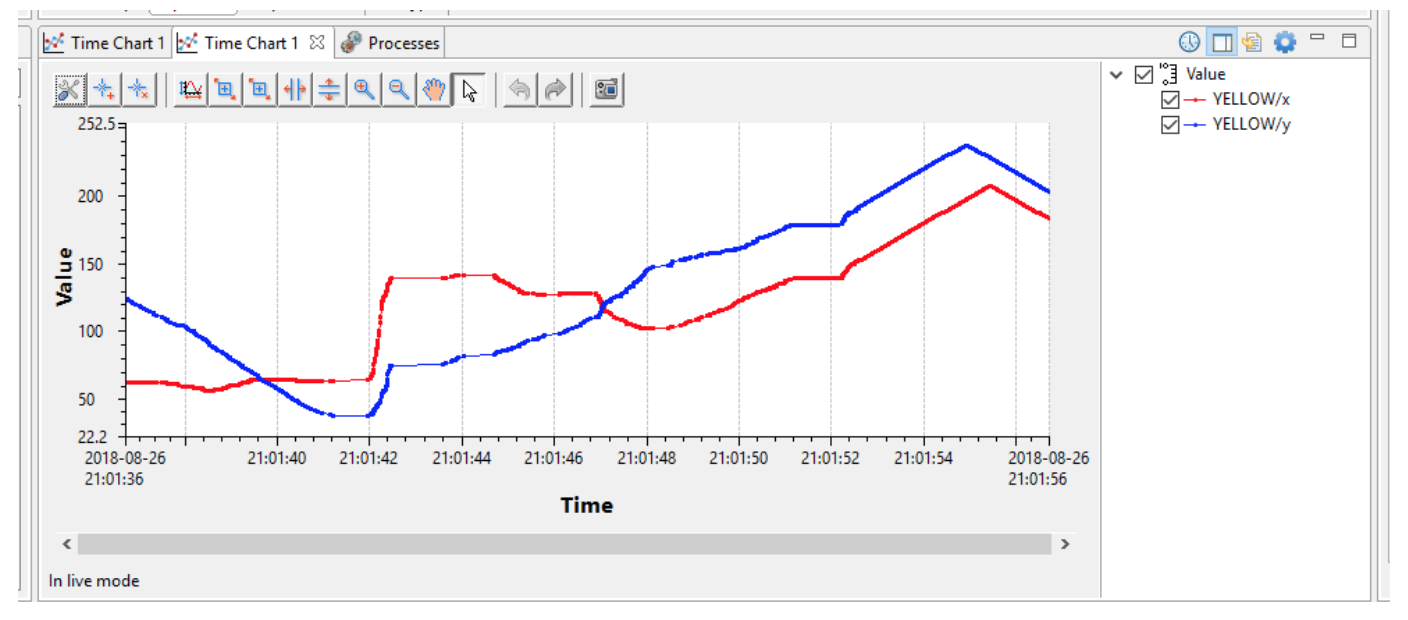
Avec l'aide de la console d'administration, j'ai pu identifier la non-concordance de QoS qui a empêché le transfert de données et faire fonctionner le système en quelques minutes.
Lire d'autres articles de blog mettant en évidence la puissance de l'écosystème ROS2/DDS combiné - pour étendre, diagnostiquer et optimiser un système ROS / ROS2 et pour fournir une visualisation 3D améliorée aux systèmes DDS purs .
ROS2 + DDS :Un guide de terrain pour l'interopérabilité
ROS2 + DDS Rejouer
ROS 2 et DDS :l'interopérabilité stimule la robotique de nouvelle génération
Technologie de l'Internet des objets
- Logiciel DDS ouvert vs RTI DDS
- Tests de logiciels chez RTI
- Connext 6 :maintenant disponible !
- ROS2 + DDS :rejouer
- ROS2 + DDS :Un guide de terrain pour l'interopérabilité
- Annonce du dernier RTI Perftest pour Connext DDS
- Comment intégrer Qt et DDS dans une application IoT
- Plateforme adaptative AUTOSAR 18.03 :maintenant avec DDS !
- L'intégration de la 5G dans les systèmes IIoT accélère l'adoption de l'industrie 4.0