


Comprendre le choix de la longueur d'onde dans les systèmes LiDAR
Il existe différents types de LiDAR. Les personnes impliquées dans l'industrie automobile doivent être conscientes des forces et des faiblesses relatives de chacune.
Il est largement reconnu que les systèmes avancés d'aide à la conduite (ADAS) et la conduite autonome (AD) peuvent réussir avec une détection efficace de l'environnement entourant le véhicule alimentant les algorithmes permettant la navigation autonome. Compte tenu de la dépendance absolue à la détection dans les situations critiques, plusieurs modalités de capteur sont utilisées avec les données fusionnées pour se compléter et fournir une redondance. Cela permet à chaque technologie d'exploiter ses atouts et d'offrir une solution mieux combinée.
Les trois modalités qui seront prédominantes pour le capteur utilisé dans les véhicules pour ADAS et AD à l'avenir sont les capteurs d'image, le radar et le LiDAR (Light Detection and Ranging). Chacun de ces capteurs a ses propres points forts et, ensemble, ils peuvent constituer une suite complète de capteurs fournissant des données pour permettre aux algorithmes de perception autonome de prendre des décisions avec la fusion de capteurs - la capacité de fournir la couleur, l'intensité, la vitesse et la profondeur pour chaque point ou noyau dans la scène.
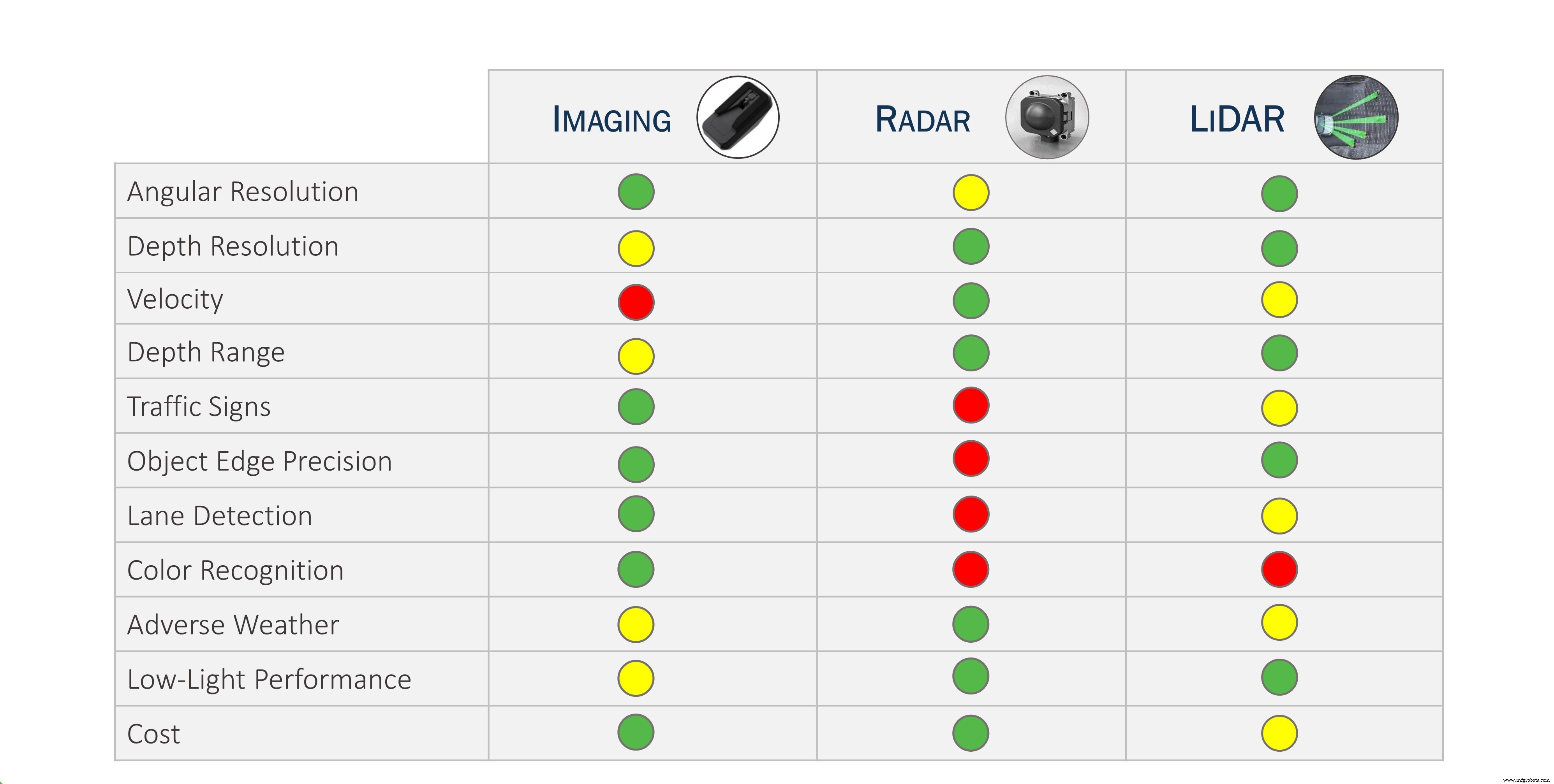
Figure 1 :La fusion de capteurs tire parti des atouts de chaque modalité pour fournir des informations complètes sur l'environnement du véhicule.
De ces trois modalités principales, le LiDAR est la technologie la plus naissante à être commercialisée pour une utilisation grand public, même si le concept d'utilisation de la lumière pour mesurer la distance remonte à des décennies. Le marché du LiDAR automobile devrait afficher une croissance spectaculaire passant de 39 millions de dollars en 2020 à 1,75 milliard de dollars projetés en 2025, selon Yole Développement, tiré par la prolifération des systèmes autonomes nécessitant la suite complète de capteurs. L'opportunité est si grande qu'il y a bien plus de 100 entreprises travaillant sur la technologie LiDAR, avec des investissements cumulés dans ces entreprises dépassant 1,5 milliard de dollars d'ici 2020 - et c'était avant le déluge d'offres publiques initiales menées par SPAC par plus d'une poignée de Les entreprises LiDAR qui ont commencé à la fin de 2020. Mais quand il y a tant d'entreprises qui travaillent sur une seule technologie - dont certaines sont fondamentalement différentes comme la longueur d'onde de la lumière utilisée (les exemples les plus importants étant 905 nm et 1550 nm) - il est inévitable qu'il y ait être une technologie gagnante et une consolidation, comme on l'a vu à maintes reprises, qu'il s'agisse d'Ethernet pour la mise en réseau ou de VHS pour la vidéo.
Quand on regarde les utilisateurs de la technologie LiDAR - les constructeurs de véhicules automobiles, ainsi que les entreprises qui conçoivent et construisent des véhicules robotiques autonomes pour le transport de personnes et de marchandises - la chose la plus importante dans leur esprit est leurs exigences. En fin de compte, ces entreprises souhaitent que les fournisseurs leur fournissent des capteurs LiDAR à faible coût avec un degré élevé de fiabilité tout en répondant aux spécifications de performances de télémétrie et de détection d'objets à faible réflectivité. Bien que tous les ingénieurs aient des points de vue solides, ces entreprises sont susceptibles d'être agnostiques quant à la mise en œuvre de la technologie si le fournisseur peut répondre aux exigences de performance et de fiabilité au juste prix. Et cela conduit au débat fondamental que cet article vise à aider à régler :quelle longueur d'onde prévaudra pour les applications LiDAR automobiles ?
Présentation du LiDAR
Pour commencer à répondre à cette question, il est nécessaire de comprendre l'anatomie d'un système LiDAR, dont il existe différentes architectures. Le LiDAR cohérent, dont un type est appelé onde continue modulée en fréquence (FMCW), mélange un signal laser transmis avec de la lumière réfléchie pour calculer la portée et la vitesse des objets. Le FMCW offre certains avantages, mais il reste relativement rare par rapport à l'approche LiDAR la plus courante, le LiDAR à temps de vol direct (dToF). Cette mise en œuvre mesure la distance à un objet en chronométrant le temps qu'il faut pour qu'une très courte impulsion de lumière émise par une source d'éclairage soit réfléchie par un objet et renvoyée pour être détectée par le capteur. Il utilise la vitesse de la lumière pour directement calculer la distance à l'objet en utilisant la formule mathématique simple reliant le temps, la vitesse et la distance. Un système LiDAR dToF typique possède six fonctions matérielles principales, bien que le choix de la longueur d'onde ait principalement un impact sur les fonctions d'émission et de réception.
cliquez pour l'image en taille réelle
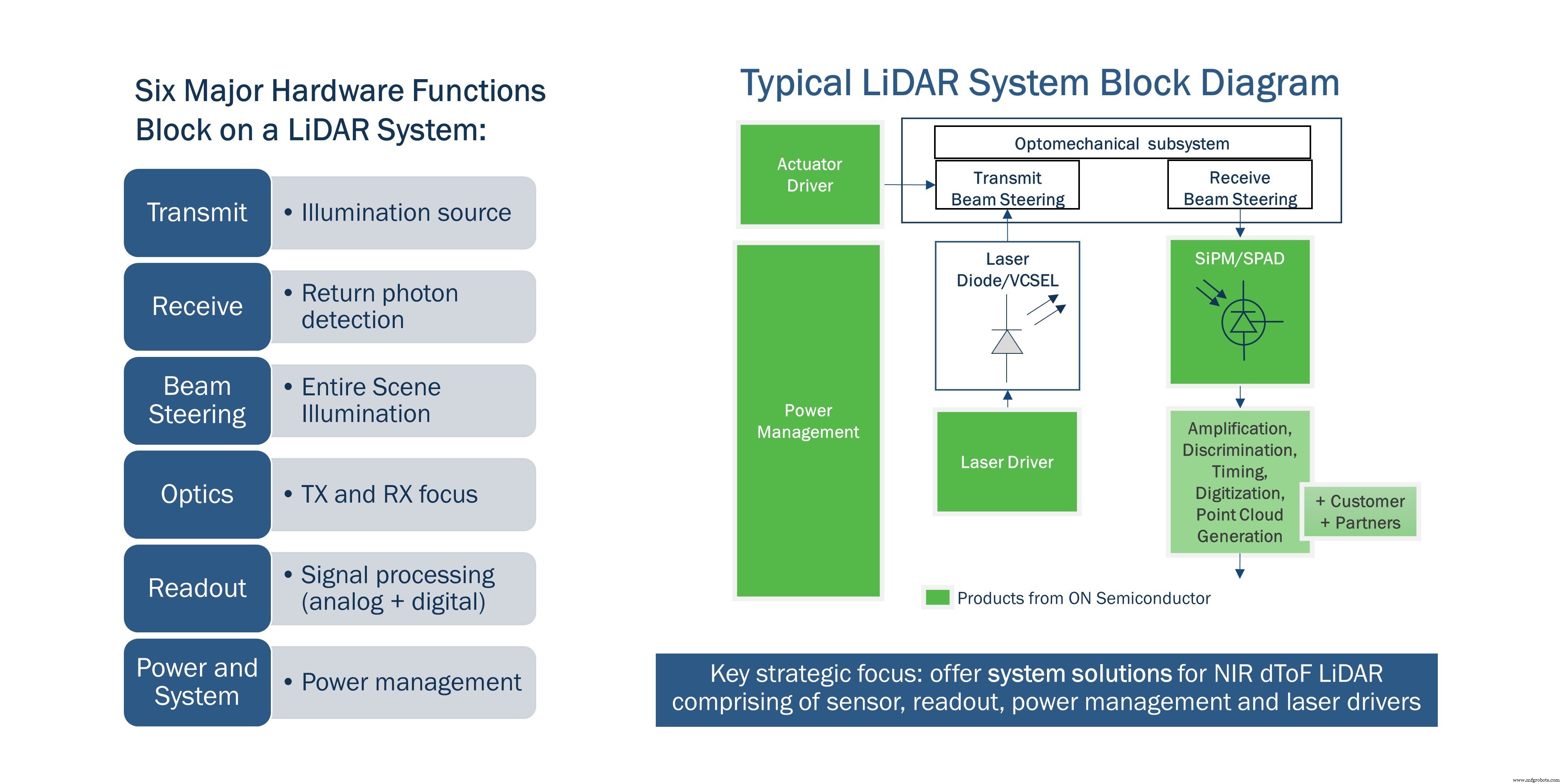
Figure 2 : un schéma fonctionnel d'un système dToF typique avec des parties vertes représentant certaines zones d'intérêt des produits ON Semiconductor.
Le tableau 1 présente une liste des différents fabricants de LiDAR qui vont des constructeurs automobiles connus de niveau 1 aux startups dans toutes les régions du monde. Sur la base de rapports de marché et d'informations publiques, la grande majorité de ces sociétés exploitent leurs LiDAR dans des longueurs d'onde du proche infrarouge (NIR), par opposition aux longueurs d'onde de l'infrarouge à ondes courtes (SWIR). En outre, alors que les fournisseurs axés sur SWIR travaillant sur FMCW sont limités à ces longueurs d'onde, la plupart de ceux qui ont une mise en œuvre directe du temps de vol ont la possibilité de créer un système avec des longueurs d'onde NIR, s'ils le souhaitent, tout en étant en mesure de tirer parti d'un beaucoup de leurs IP existantes autour de fonctions telles que l'orientation des faisceaux et le traitement du signal.
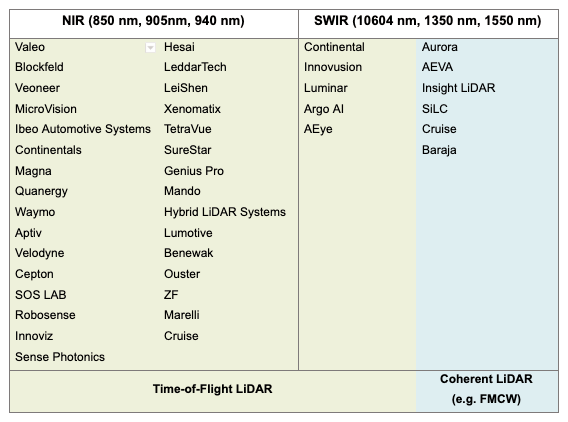
Tableau 1 :Liste des fabricants de LiDAR qui opèrent dans les longueurs d'onde NIR et SWIR. Pas une liste exhaustive. (Source de l'image :Yole, IHS Markit et divulgations publiques)
Étant donné que la majorité, mais pas tous, de ces fabricants ont choisi les longueurs d'onde NIR, comment ils sont arrivés à cette décision et quelles sont les implications doivent être pris en compte. Au cœur de la discussion se trouvent quelques notions de physique de base liées aux propriétés de la lumière et des matériaux semi-conducteurs constituant les composants utilisés dans le LiDAR.
Les photons tirés par le laser dans un système LiDAR, qui sont destinés à être renvoyés par des objets et reçus par le détecteur, doivent rivaliser avec les photons ambiants provenant du soleil. En regardant le spectre du rayonnement solaire et en tenant compte de l'absorption atmosphérique, il y a des « creux » dans l'irradiance à certaines longueurs d'onde qui réduiraient la quantité de photons existant comme bruit pour le système. À 905 nm, il y a environ 3 fois plus d'éclairement solaire qu'à 1550 nm, ce qui signifie qu'un système NIR doit faire face à plus de bruit qui peut interférer avec le capteur. Mais ce n'est qu'un des facteurs à prendre en compte lors du choix d'une longueur d'onde pour un système LiDAR.
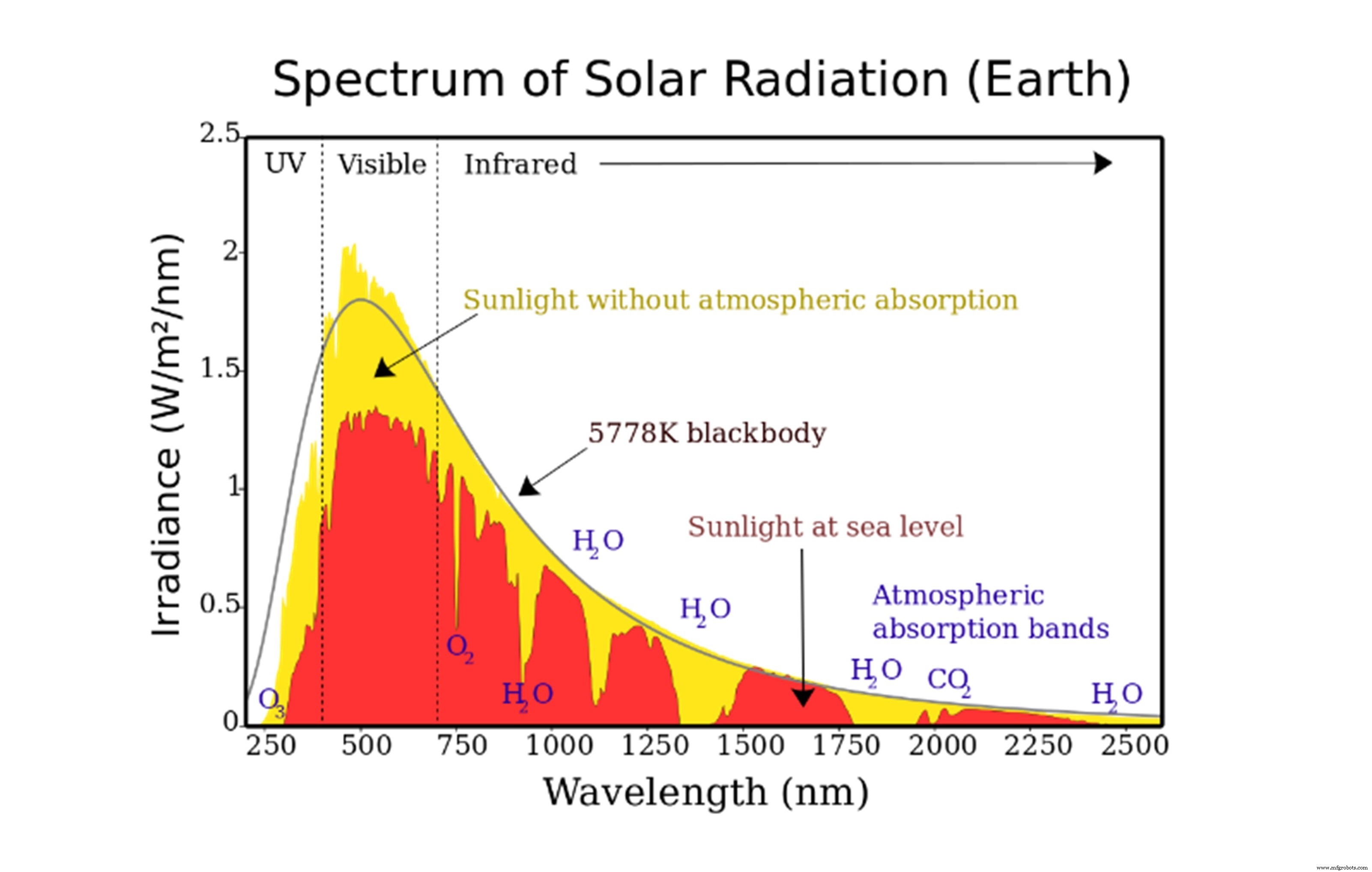
Figure 3 : l'absorption atmosphérique de la lumière donne des pics clairs.
Capteurs
Les composants responsables de la détection des photons dans le système LiDAR sont différents types de photodétecteurs, il est donc important d'expliquer pourquoi ils peuvent être constitués de différents matériaux semi-conducteurs en fonction de la longueur d'onde à détecter. Dans un semi-conducteur, une bande interdite sépare les bandes de valence et de conduction. Les photons fournissent l'énergie nécessaire aux électrons pour surmonter cette bande interdite et rendre le semi-conducteur conducteur, créant ainsi un photocourant. L'énergie de chaque photon est liée à sa longueur d'onde, et la bande interdite d'un semi-conducteur est liée à sa sensibilité - c'est pourquoi différents matériaux semi-conducteurs sont nécessaires en fonction de la longueur d'onde de la lumière à détecter. Le silicium, qui est le semi-conducteur le plus courant et le moins cher à fabriquer, est sensible aux longueurs d'onde visibles et NIR jusqu'à environ 1000 nm. Pour détecter des longueurs d'onde au-delà de celles de la gamme SWIR, l'alliage de semi-conducteurs plus exotiques du groupe III/V peut être fait pour fabriquer des matériaux comme InGaAs capables de détecter ces longueurs d'onde de lumière, de 1 000 nm à 2 500 nm.
Les premiers LiDAR utilisaient des photodiodes PIN comme capteurs. Les photodiodes PIN n'ont pas de gain inhérent et, par conséquent, ne sont pas capables de détecter facilement les signaux faibles. Les photodiodes à avalanche (APD) sont le type de capteur le plus utilisé dans le LiDAR aujourd'hui et fournissent un gain modéré. Cependant, les APD doivent également fonctionner en mode linéaire comme les photodiodes PIN pour intégrer le signal des arrivées de photons et souffrent également d'une mauvaise uniformité de pièce à pièce, tout en nécessitant des tensions de polarisation très élevées. Les types de capteurs les plus récents qui sont de plus en plus utilisés dans les LiDAR sont construits sur des diodes à avalanche à photon unique (SPAD), qui ont un gain très important et sont capables de produire une sortie de courant mesurable à partir de chaque photon détecté. Les photomultiplicateurs au silicium (SiPM) sont des matrices de SPAD à base de silicium qui présentent l'avantage supplémentaire de pouvoir distinguer les photons uniques des photons multiples en examinant l'amplitude du signal généré.
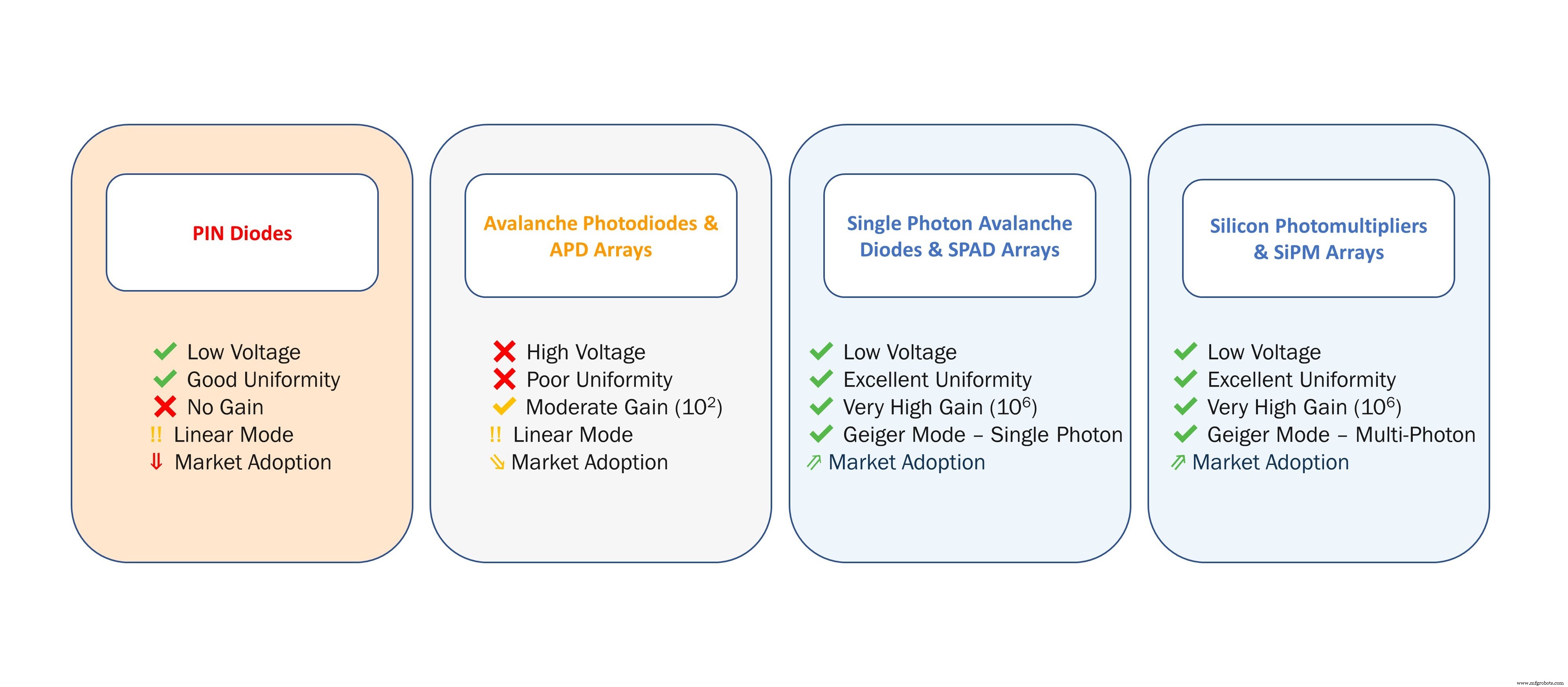
Figure 4 : différents types de photodétecteurs utilisés pour détecter des signaux dans un LiDAR
Pour en revenir à la pertinence du sujet des longueurs d'onde, tous ces types de photodétecteurs peuvent être construits sur du silicium (pour la détection NIR) ou des semi-conducteurs III/V (pour la détection SWIR). D'un autre côté, la fabrication et le coût sont essentiels à la viabilité de la technologie, et les fonderies de silicium CMOS permettent la fabrication en grand volume et à faible coût de tels capteurs. C'est la principale raison pour laquelle les SiPM sont de plus en plus adoptés pour le LiDAR en plus de permettre des performances plus élevées. Bien qu'il existe des APD et des SPAD pour SWIR, il est difficile de les intégrer à une logique de lecture en raison du fait que les processus ne sont pas à base de silicium. Enfin, les matrices SPAD et photomultiplicateurs basés sur III/V (analogues aux SiPM) pour SWIR n'ont pas encore été commercialisés, de sorte que la disponibilité de l'écosystème favorise les longueurs d'onde NIR.
Lasers
La génération de photons implique un processus totalement différent. Une jonction p-n semi-conductrice comme milieu de gain peut être utilisée pour fabriquer un laser ; cela se fait en pompant un courant à travers la jonction provoquant l'émission résonante de photons lorsque les atomes se dirigent vers des bandes d'énergie inférieures, ce qui entraîne une sortie de faisceau laser cohérente. Les lasers à semi-conducteurs sont basés sur des matériaux à bande interdite directe tels que GaAs et InP, qui sont efficaces pour la génération de photons qui se produit lorsque les atomes passent dans une bande d'énergie inférieure, contrairement aux matériaux à bande interdite indirecte tels que le silicium.
Il existe deux principaux types de lasers utilisés dans le LiDAR :le laser à émission latérale (EEL) et le laser à cavité verticale à émission de surface (VCSEL). Les EEL sont plus largement utilisées aujourd'hui, en raison de leur coût inférieur et de leur rendement supérieur à celui des VCSEL. Ils sont plus difficiles à emballer et à intégrer dans des matrices et souffrent également d'un décalage de longueur d'onde en fonction de la température, ce qui oblige les détecteurs à rechercher une bande plus large de longueurs d'onde de photons, ce qui permet de détecter davantage de photons ambiants sous forme de bruit. Malgré le coût plus élevé et l'efficacité énergétique plus faible, la nouvelle technologie VCSEL présente l'avantage d'un emballage simple et efficace puisque le faisceau est généré par le haut. L'adoption par le marché du VCSEL augmente, car ses coûts continueront de baisser de manière significative et l'efficacité énergétique s'améliorera. Les EEL et les VCSEL existent pour la génération de longueurs d'onde NIR et SWIR, avec une différence clé :les longueurs d'onde NIR peuvent être générées avec GaAs, tandis que les longueurs d'onde SWIR nécessitent l'utilisation d'InGaAsP. Les lasers GaAs sont capables d'utiliser des fonderies de plus grande taille de plaquettes, ce qui permet de réduire les coûts, ce qui montre encore une fois un avantage pour l'écosystème des fabricants de LiDAR NIR du point de vue des coûts et de la sécurité de la chaîne d'approvisionnement.
cliquez pour l'image en taille réelle
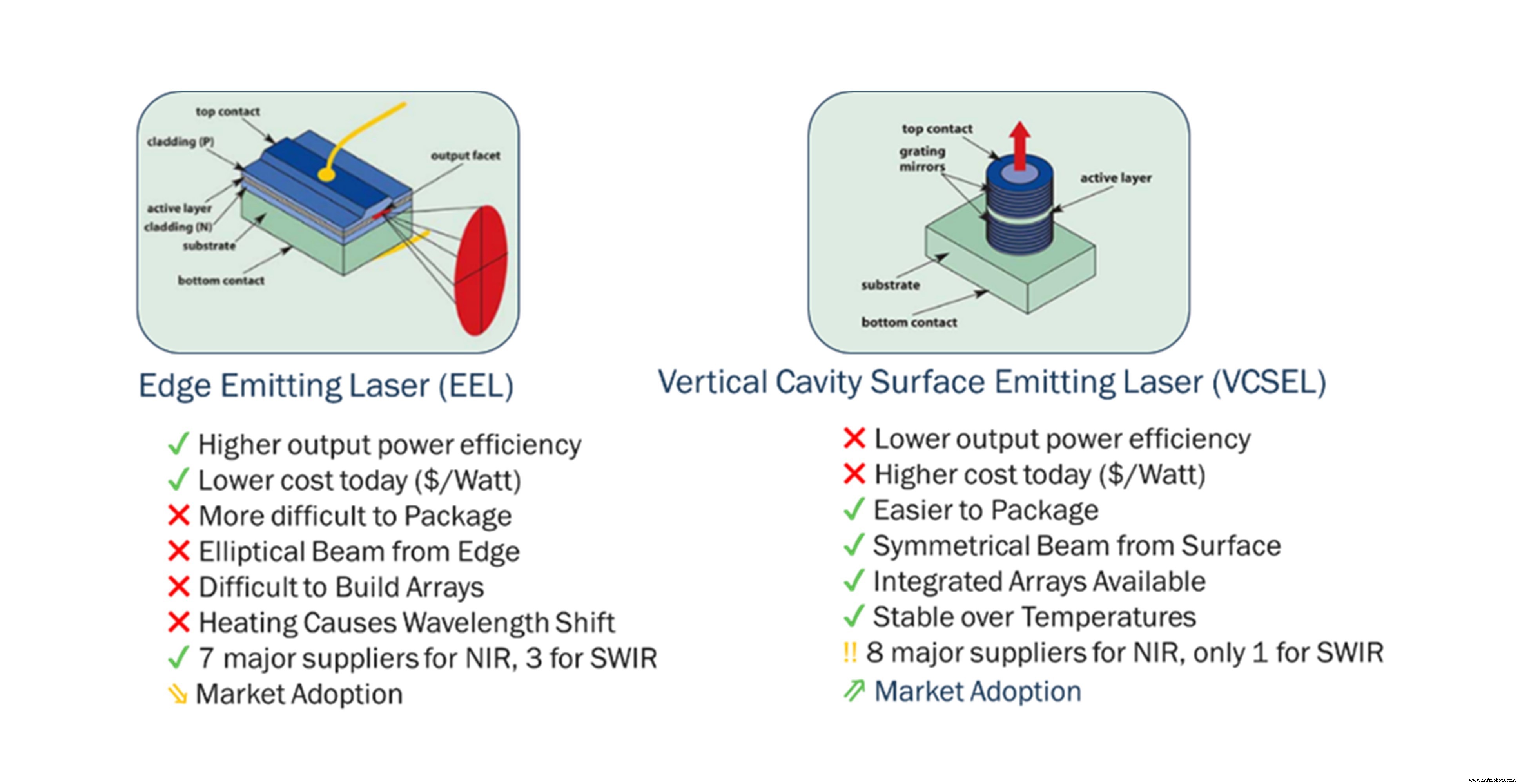
Figure 5 : différents types de lasers utilisés dans un LiDAR.
Puissance du laser et sécurité des yeux
Tout en parlant du débat sur les longueurs d'onde, il est impératif de considérer les implications d'un système LiDAR sur la sécurité des yeux. Le concept du LiDAR dToF consiste à utiliser des impulsions laser courtes avec une puissance de crête élevée sur un certain angle de vue à émettre vers la scène. Un piéton se trouvant sur le chemin d'émission d'un LiDAR doit être assuré que ses yeux ne seront pas endommagés par un laser tiré dans sa direction, et la norme IEC-60825 est une spécification qui dicte l'exposition maximale admissible sur les différents longueurs d'onde de la lumière. Alors que la lumière NIR, similaire à la lumière visible, est capable de traverser la cornée et d'atteindre la rétine de l'œil humain, la lumière SWIR est principalement absorbée dans la cornée et, par conséquent, peut être exposée à des niveaux plus élevés.
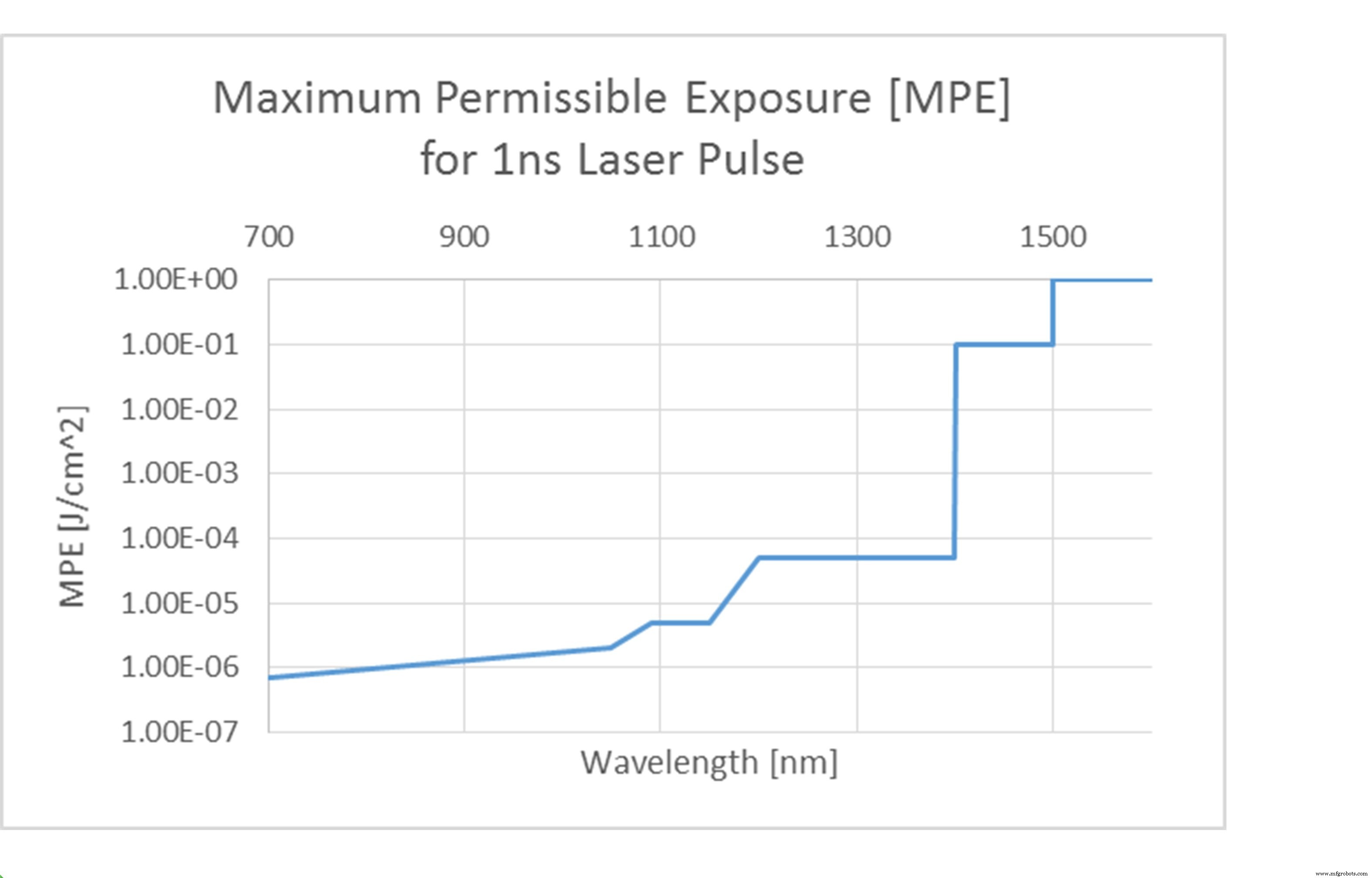
Figure 6 : Spécification IEC-60825 pour une exposition au laser sans danger pour les yeux.
Être capable de produire une puissance laser plus élevée de plusieurs ordres de grandeur est un avantage pour un système basé sur 1550 nm du point de vue des performances, car il permet d'envoyer plus de photons et donc d'être renvoyés pour être détectés. Des puissances laser plus élevées s'accompagnent également d'un compromis thermique. Il convient de noter qu'une conception appropriée sans danger pour les yeux doit être effectuée quelle que soit la longueur d'onde en prenant clairement en compte l'énergie par impulsion et la taille de l'ouverture laser. Avec un LiDAR basé sur 905 nm, la puissance de crête peut être augmentée par l'un de ces facteurs, comme le montre la figure 7.
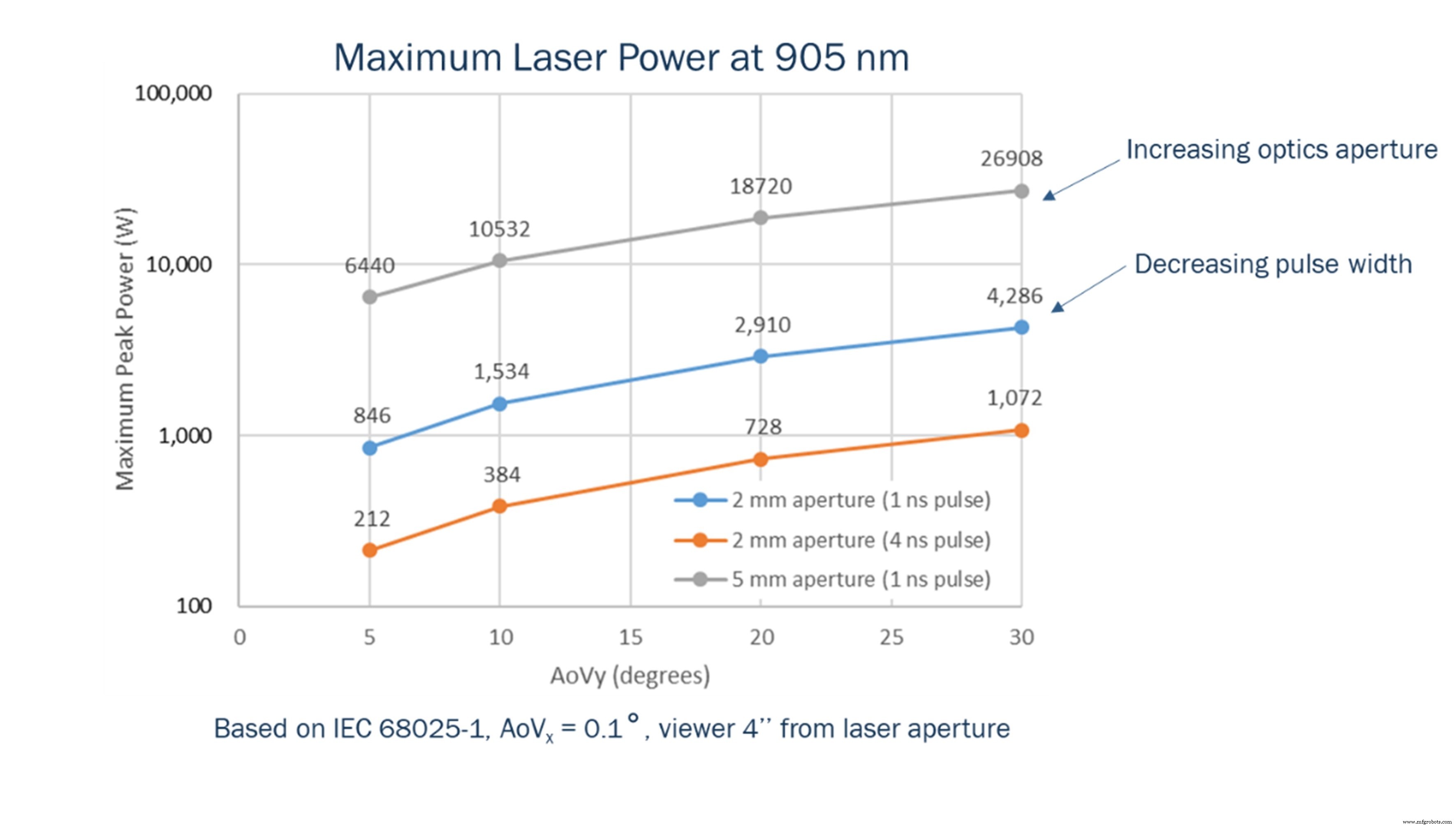
Figure 7 :Conception laser sans danger pour les yeux pour un LiDAR NIR compte tenu de différents paramètres optiques et laser.
Comparaison des systèmes LiDAR NIR et SWIR
L'accent mis ci-dessus sur la quantité de puissance laser pouvant être émise nous ramène aux capteurs utilisés. Un capteur plus performant capable de détecter des signaux plus faibles profitera clairement au système de plusieurs manières - en pouvant atteindre une portée plus longue ou en pouvant utiliser moins de puissance laser pour atteindre la même portée. ON Semiconductor a développé une série de SiPM pour NIR LiDAR conduisant l'efficacité de détection de photons (PDE) - un paramètre clé indiquant la sensibilité - à 18% avec ses derniers capteurs de la série RDM.
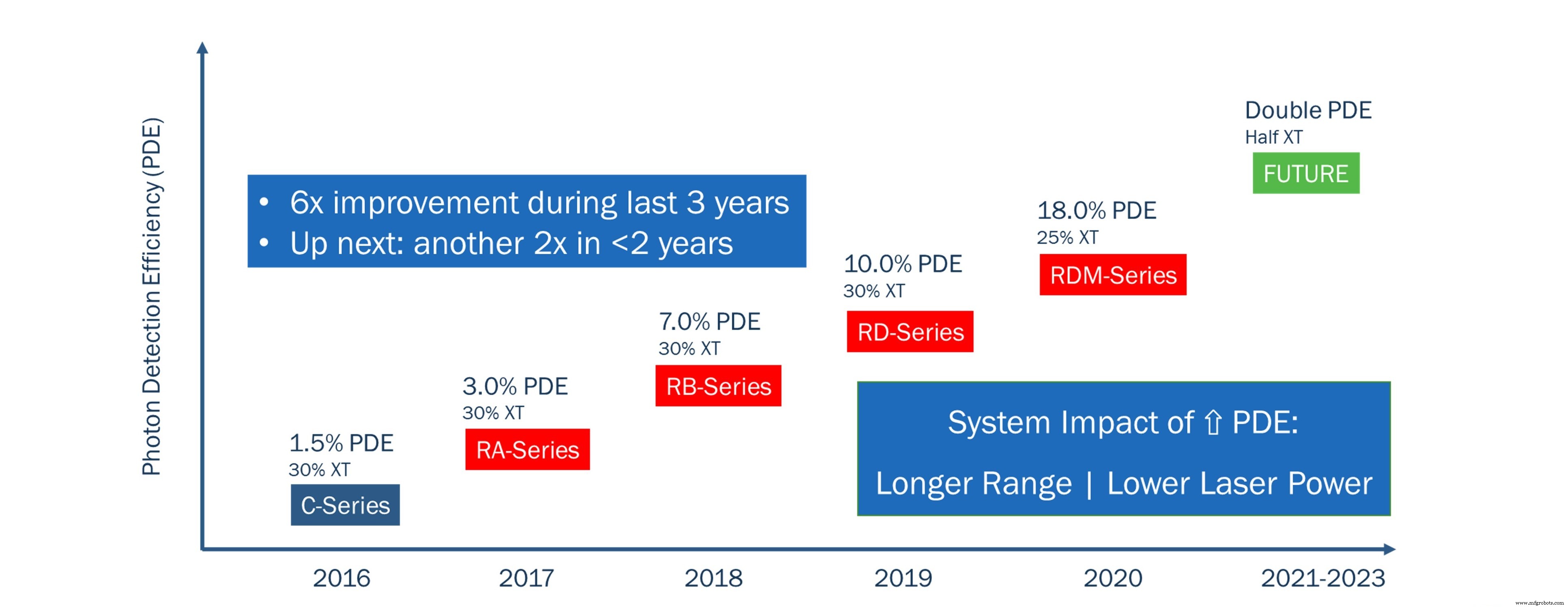
Figure 8 :Feuille de route des processus des SiPM d'ON Semiconductor.
Pour comparer les performances d'un LiDAR NIR dToF avec un LiDAR SWIR dToF, nous avons effectué une modélisation du système pour des architectures LiDAR et des conditions environnementales identiques avec des paramètres différents pour les lasers et les capteurs. L'architecture LiDAR est un système coaxial avec un réseau de détecteurs à 16 canaux et un mécanisme de balayage pour s'étendre à travers le champ de vision, comme le montre la figure 10. Ce modèle de système a été validé avec du matériel et nous permet d'estimer avec précision les performances du LiDAR systèmes.
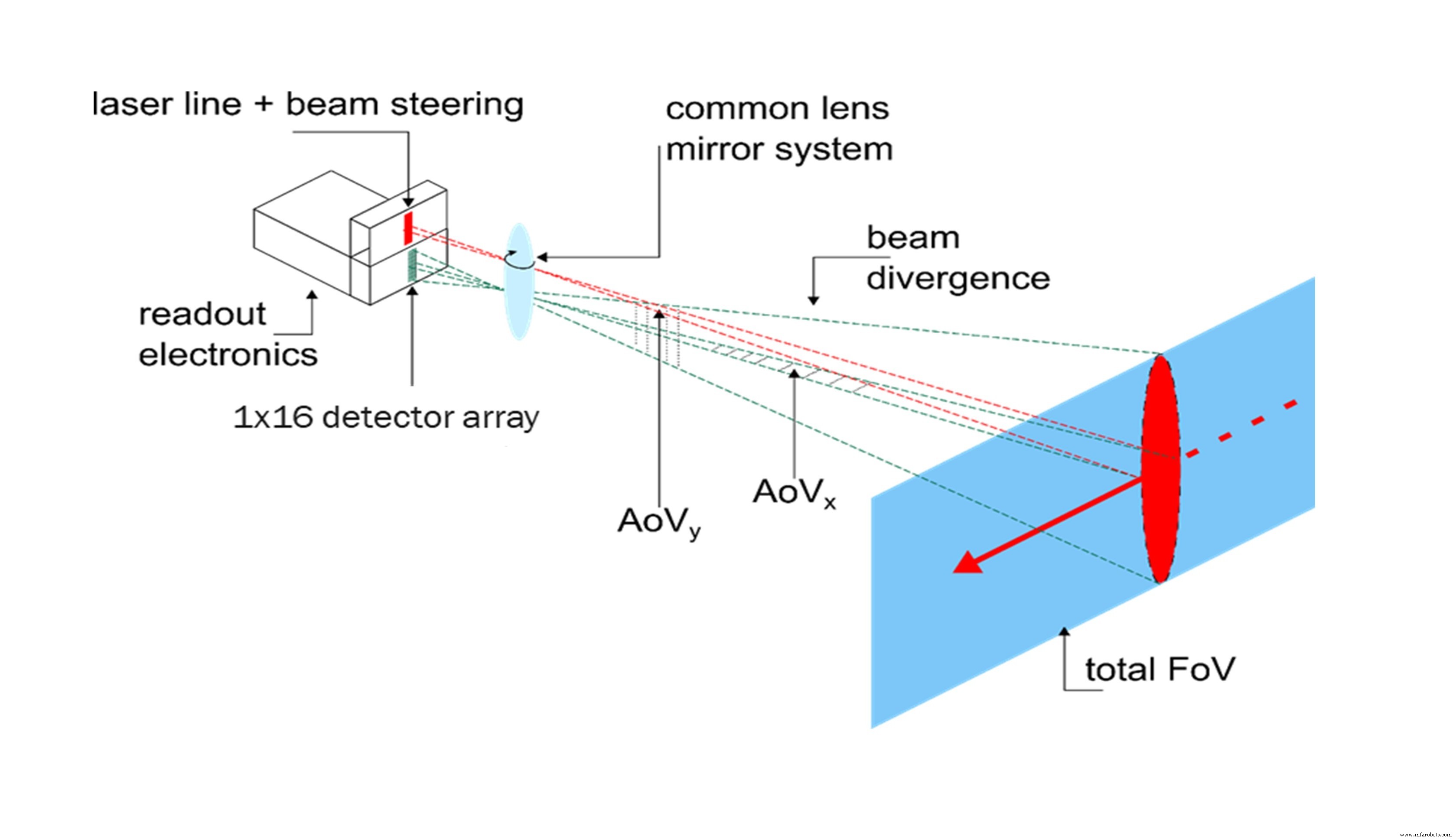
Figure 9 :Modèle de système pour un capteur LiDAR dToF.
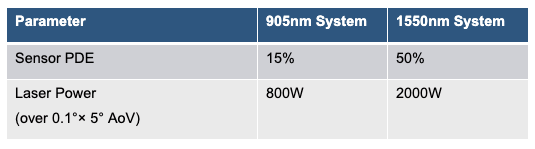
Tableau 2 :Paramètres du capteur LiDAR et du laser pour la simulation du modèle de système NIR et SWIR.
Le système à 1550 nm utilise une quantité plus élevée de puissance laser, ainsi qu'un capteur PDE plus élevé en raison de son utilisation d'alliages InGaAs à haute PDE, ce qui devrait donner des performances de meilleure portée dans notre simulation de système. En utilisant des paramètres au niveau du système de lumière ambiante de 100 klux filtrée par une bande passante de 50 nm sur la lentille du capteur (centrée respectivement autour de 905 nm et 1550 nm), un angle de vue de 0,1° x 5° balayé sur 80° horizontalement à 30 ips, un taux de répétition laser de 500 kHz avec Largeur d'impulsion de 1 ns et diamètre de lentille de 22 mm, les résultats sont illustrés à la figure 10.
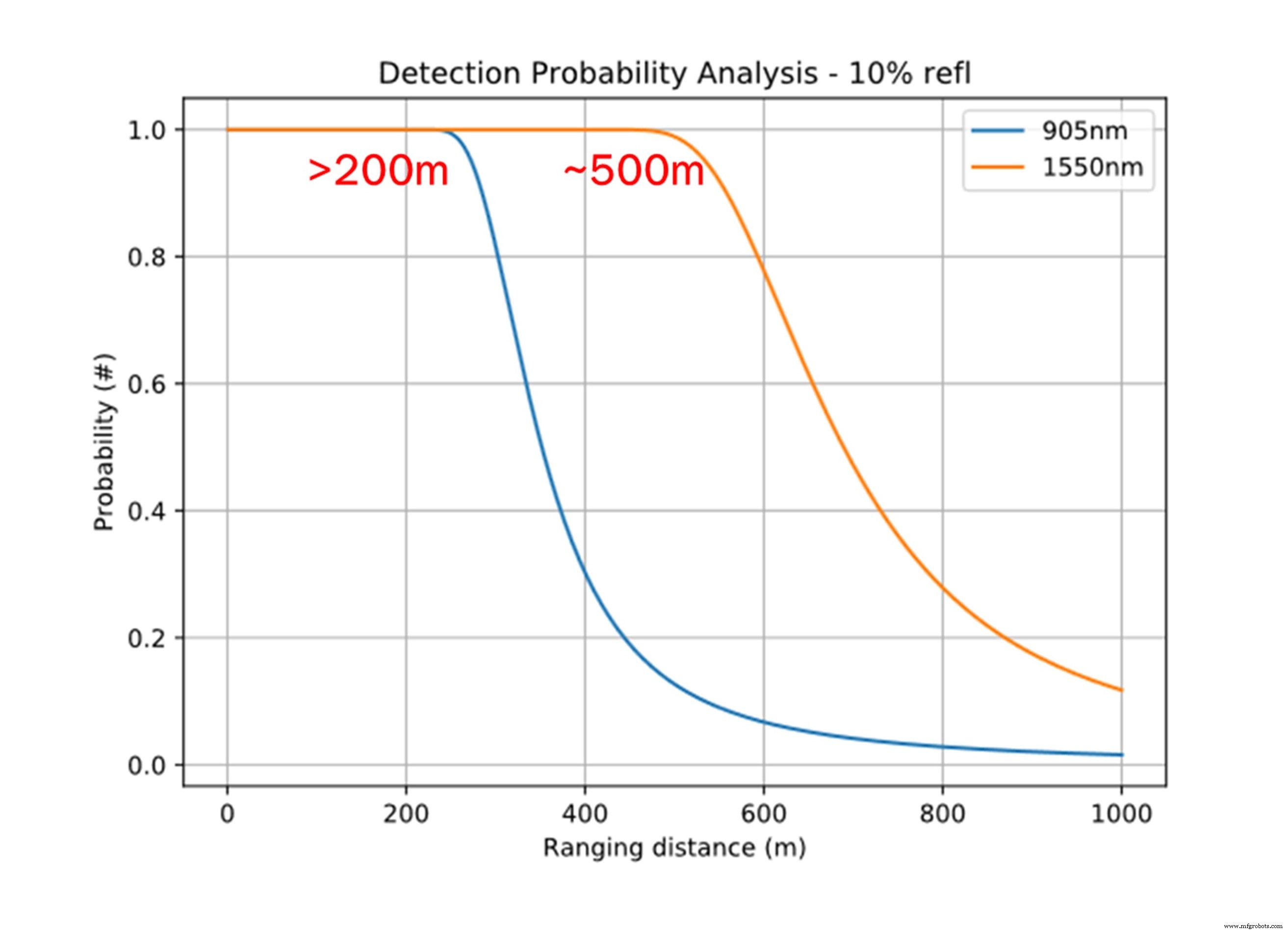
Figure 10 :Résultats de simulation pour des systèmes LiDAR similaires basés sur 905 nm et 1550 nm.
Comme prévu, le système à 1550 nm est capable de s'étendre plus loin pour un objet à faible réflectivité, allant jusqu'à 500 m avec une probabilité de portée de 99%. Cependant, le système basé sur 905 nm atteint toujours plus de 200 m de portée, ce qui montre que les deux types de systèmes peuvent répondre aux exigences LiDAR automobile à longue portée dans des conditions environnementales typiques. Lorsque de mauvaises conditions environnementales telles que la pluie ou le brouillard sont introduites, les propriétés d'absorption d'eau de la lumière SWIR entraînent une dégradation plus rapide de ses performances qu'un système basé sur le NIR, ce qui est un autre facteur à prendre en compte.
Considérations relatives aux coûts
Après avoir examiné en détail la technologie derrière les systèmes LiDAR, ainsi que les implications de l'utilisation de différentes longueurs d'onde, nous revenons maintenant au facteur de considérations de coût. Nous avons expliqué précédemment que les capteurs utilisés pour les LiDAR basés sur le NIR proviennent de processus de fonderie de silicium CMOS natifs, qui permettent le coût le plus bas possible pour les semi-conducteurs. En outre, ils permettent également l'intégration de la logique de lecture CMOS avec le capteur dans une puce en utilisant la technologie des matrices empilées, qui est facilement disponible dans les fonderies aujourd'hui, ce qui réduit davantage la chaîne de signaux et réduit les coûts. À l'inverse, les capteurs SWIR utilisent des fonderies de semi-conducteurs III/V comme InGaAs qui sont plus coûteux et la nouvelle technologie hybride Ge-Si - qui peut permettre des capteurs SWIR à moindre coût - facilitant l'intégration avec la logique de lecture mais sont toujours estimées à plus de 5 fois plus chères que le silicium CMOS traditionnel même après avoir atteint la maturité. Côté laser, la différence de taille de plaquette entre les plaquettes GaAs utilisées pour fabriquer les puces laser dans les systèmes NIR et les plaquettes InGaAs utilisées pour fabriquer les puces laser dans les systèmes SWIR conduit à nouveau à une disparité de coûts, et le fait que les systèmes NIR ont un chemin vers l'utilisation de VCSEL avec une base de fournisseurs beaucoup plus facilement disponible permet également une intégration à moindre coût.
La somme des facteurs ci-dessus a conduit à une analyse réalisée par IHS Markit (Amsrud, 2019), qui a montré que pour le même type de composant (le capteur ou le laser), le coût d'un système SWIR serait 10 à 100 fois plus élevé qu'un système NIR. Le coût moyen des composants combinés du capteur et du laser pour un système NIR a été estimé entre 4 et 20 dollars par canal en 2019 et diminuait à 2 à 10 dollars d'ici 2025. En revanche, le coût moyen équivalent des composants d'un système SWIR a été estimé à être de 275 $ par canal en 2019 et diminuer à 155 $ par canal d'ici 2025. C'est une énorme différence de coût si l'on considère le fait que les systèmes LiDAR contiennent plusieurs canaux, même en utilisant une approche de balayage 1D puisqu'un réseau vertical de canaux à point unique est toujours requis.
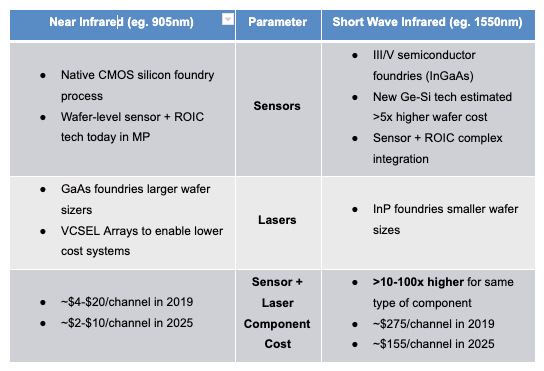
Tableau 3 :Résumé des considérations de coût. (Source de l'image :IHS Markit)
La dynamique du marché LiDAR ne favorise pas non plus le camp SWIR. Le marché de la conduite autonome n'a pas augmenté aussi rapidement que les attentes du marché il y a cinq ans, et les systèmes d'autonomie de niveau 4 et de niveau 5, pour lesquels LiDAR est un must, sont à des années d'un déploiement de masse généralisé. En attendant, les marchés industriels et de la robotique utilisant le LiDAR sont encore plus soucieux des coûts et n'ont pas besoin des avantages ultra-performants d'un système SWIR, de sorte que ces fabricants n'ont pas la possibilité entre-temps d'apporter des composants les coûts en augmentant le volume comme on le prétend souvent. Il y a un problème de « la poule et l'œuf » pour obtenir le coût le plus bas lorsque le volume augmente, mais avoir besoin du coût le plus bas pour obtenir les volumes.
Résumé
Après avoir approfondi la technologie et les différences entre les systèmes NIR et SWIR, il est clair pourquoi la grande majorité des systèmes LiDAR existants utilisent des longueurs d'onde NIR. Bien que les perspectives d'avenir ne soient jamais certaines à 100 %, il est évident que le coût et la disponibilité des fournisseurs d'écosystèmes sont des facteurs clés, et les systèmes basés sur le NIR seront certainement toujours moins chers en raison de l'avantage technologique et des économies d'échelle du silicium CMOS. Et tandis que SWIR permet un système LiDAR à plus longue portée, les LiDAR basés sur NIR peuvent également répondre aux exigences automobiles à longue portée souhaitées, tout en étant extrêmement performants pour les configurations à courte et moyenne portée également nécessaires dans ADAS et AD. L'existence de LiDAR basés sur le NIR en production de masse pour le marché automobile montre aujourd'hui que la technologie a été commercialisée et éprouvée, mais il faudra encore un certain temps pour que la consolidation se produise et que les gagnants et les perdants se fassent entendre. Après tout, l'industrie automobile au tournant du 20e siècle comptait 30 fabricants différents, et ce nombre est passé à près de 500 au cours des dix années suivantes, mais il n'a fallu que quelques années pour que la plupart d'entre eux disparaissent. On s'attend à ce qu'une dynamique similaire se produise avec les fabricants de LiDAR d'ici la fin de cette décennie.
Références
Yole Développement (2020). LiDAR pour les applications automobiles et industrielles – Rapport sur le marché et la technologie 2020
Amsrud, P. (25 septembre 2019). La course à un système LIDAR à faible coût [Présentation de la conférence] . LIDAR automobile 2019, Detroit, MI, États-Unis. IHS Markit.
— Bahman Hadji, directeur du développement commercial, division de détection automobile, ON Semiconductor
>> Cet article a été initialement publié sur notre site frère, EE Heures.
Contenus associés :
- Les experts ADAS réfléchissent à l'intégration de capteurs dans les futurs véhicules
- Villes intelligentes :le cas du lidar dans les systèmes de transport intelligents
- Quels sont les moteurs du changement dans les systèmes électroniques automobiles
- La technologie du temps de vol promet une précision accrue
- Pourquoi la technologie de détection FIR est essentielle pour obtenir des véhicules entièrement autonomes
Pour plus d'informations sur Embedded, abonnez-vous à la newsletter hebdomadaire d'Embedded.
Capteur
- Le capteur Hall cible les systèmes automobiles critiques pour la sécurité
- Concevoir des systèmes d'agriculture intelligents open source
- Comprendre les capteurs
- « Peau électronique » bimodale
- Temps de vol par rapport aux systèmes LiDAR FMCW
- Film de capteur pour l'aérospatiale
- Capteur poumon-cœur miniature sur puce
- Capteur de dioxyde de carbone à semi-conducteurs
- Capteur de qualité de l'air à base de carbone