


Utilisation d'un CAN delta-sigma dans des systèmes multicapteurs haute précision
Les configurations multi-capteurs pour les mesures de pétrole, de gaz et de pétrole acquièrent en permanence des données de pression et thermiques sensibles. Cependant, la capture des diverses combinaisons d'entités physiques de température et de pression nécessite un système très concis et à haute résolution.
C'est un défi pour les concepteurs, car les circuits de capteurs haute résolution requis s'étendent sur de larges plages de température et de pression. Dans la plupart des cas, l'électronique multi-capteurs est trop grande pour une application en usine, et le conditionnement des signaux analogiques discrets n'est pas assez précis ou robuste (Figure 1).
 Figure 1 :Une soupape de sécurité de pression protège les systèmes de tuyauterie contre la surpression. (Source :Shutterstock)
Figure 1 :Une soupape de sécurité de pression protège les systèmes de tuyauterie contre la surpression. (Source :Shutterstock)
La solution à l'électronique multi-capteurs réside dans le CAN haute résolution. La combinaison d'un thermocouple, d'un détecteur de température à résistance (RTD), de capteurs de pression et d'un convertisseur analogique-numérique (ADC) est réalisable avec un ADC delta-sigma (ΔΣ) multicanal précis, haute vitesse, où la spécification clé est le bruit RMS. Cela crée un système multi-capteurs robuste et de haute précision pour l'électronique pétrolière, gazière et pétrolière.
Cet article traite brièvement des problèmes associés à la réalisation d'une interface de cellule de température et de pression précise à l'aide d'un ΔΣ ADC.
Détection de pression
Les appareils de mesure de pression sont ceux qui nécessitent une excitation électrique et ceux où la pression est la seule source d'alimentation. Les dispositifs de style mécanique comprennent des soufflets, des diaphragmes, des bourdons, des tubes et des manomètres. Avec ces appareils, un changement de pression déclenche une réaction mécanique, comme un changement de position du bras mécanique ou du niveau de liquide d'un tube.
Les capteurs de pression excités électriquement sont synergiques avec les CAN et les microcontrôleurs. Ces capteurs peuvent être des capteurs capacitifs, des transformateurs différentiels variables linéaires (LVDT) ou des capteurs piézorésistifs. Typiquement, le capteur piézorésistif est le dispositif de choix (Figure 2).

Figure 2 :Un capteur de pression piézorésistif (a) est généralement le dispositif de choix. Le côté haut du modèle de pont piézorésistif (b) nécessite une excitation en tension ou en courant. (Source :Maxim Integrated)
Sur la figure 2a, la partie supérieure du capteur fabriqué est un matériau résistif et la partie inférieure est un diaphragme. Le côté haut du modèle de pont piézorésistif (figure 2b) nécessite une excitation en tension ou en courant. L'amplitude de l'excitation affecte la plage dynamique de la sortie du capteur, la différence maximale entre VOUT + et VOUT – dans un réseau 3,3 V, qui varie généralement de quelques dizaines de millivolts à plusieurs centaines de millivolts. L'électronique, qui suit le capteur en pont à l'aide d'amplificateurs et d'un CAN, change le signal de sortie différentiel en représentation numérique.
Importance de la détection de température
Il existe de nombreux types de capteurs de température adaptés à toute application en termes de plage de température, de linéarité, de précision, de robustesse et de facilité d'utilisation. Les capteurs de température de cette application surveillent la température du capteur de pression pour garantir des lectures de pression fiables. Pour effectuer cette mesure de température, cette application utilise un thermocouple de type K et un RTD (Figure 3).
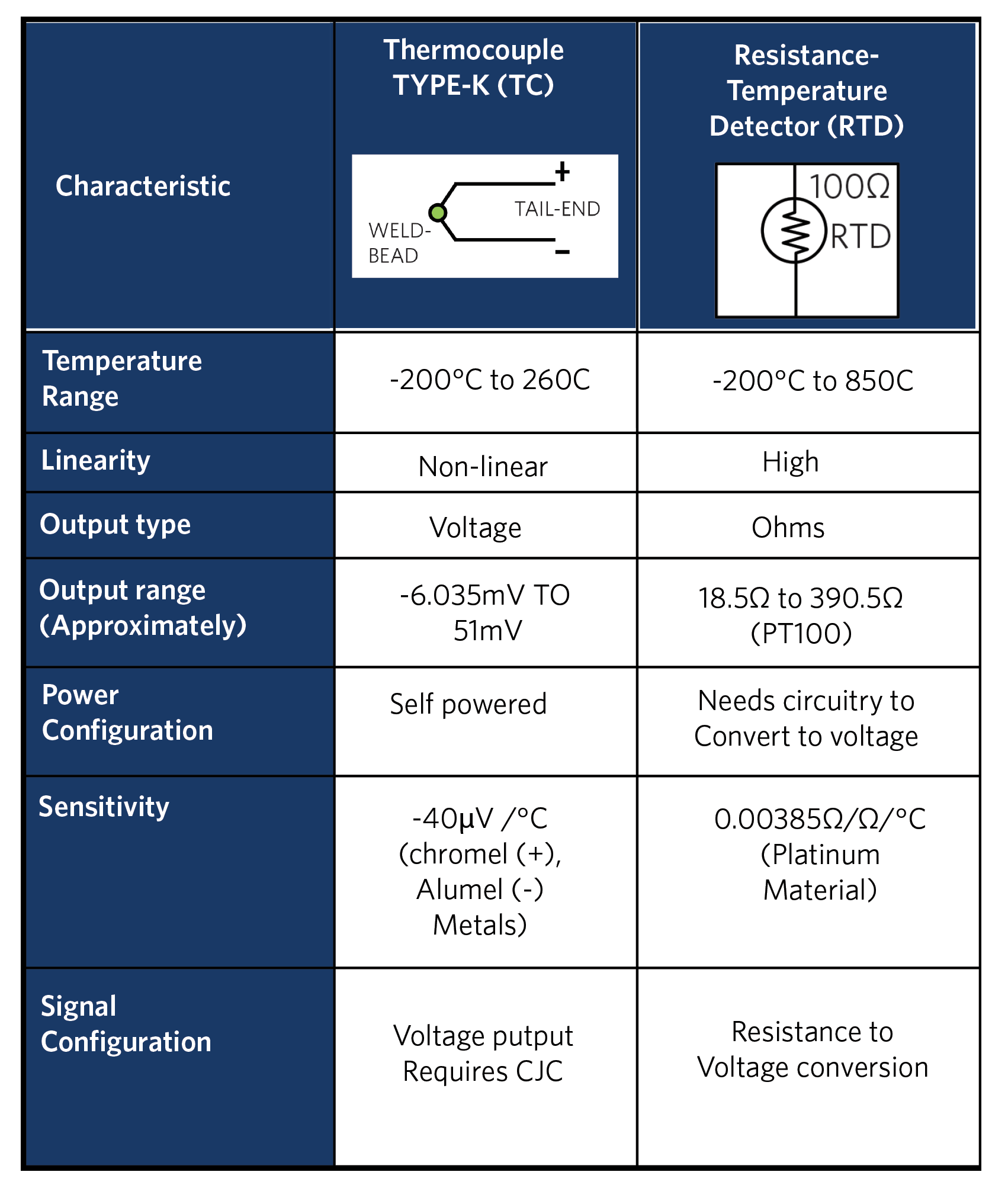 Figure 3 :Un thermocouple TYPE-K à deux fils nécessite une deuxième mesure de température avec le RTD pour la compensation de soudure froide (CJC). (Source :Maxim Integrated)
Figure 3 :Un thermocouple TYPE-K à deux fils nécessite une deuxième mesure de température avec le RTD pour la compensation de soudure froide (CJC). (Source :Maxim Integrated)
Dans la figure 3, le capteur de température à thermocouple robuste peut détecter des températures élevées jusqu'à +1260 °C, tandis que le RTD mesure la température aux jonctions thermocouple/cuivre.
CAN haute résolution
Avec les CAN, il existe un compromis très important entre la résolution et la vitesse. Parmi les convertisseurs les plus rapides, le pipeline ADC peut produire des débits de données à des vitesses de dizaines de giga-échantillons par seconde (Gsps), tout en produisant des résolutions respectables allant jusqu'à 12 bits.
L'ADC intermédiaire est le convertisseur de registre d'approximations successives (SAR). Ce convertisseur produit des échantillons à une sortie plus lente que le convertisseur pipeline fonctionnant à environ 10 Ksps à 10 Msps et avec une augmentation de la résolution jusqu'à 18 bits. Le convertisseur SAR est un bon bourreau de travail de l'industrie, si les tailles acceptables du bit le moins significatif (LSB) de la tension d'entrée sont en microvolts (μV). Cependant, si l'application nécessite des conversions de tailles LSB dans la région des nanovolts (nV), la seule alternative possible est un ΔΣ ADC (Figure 4).
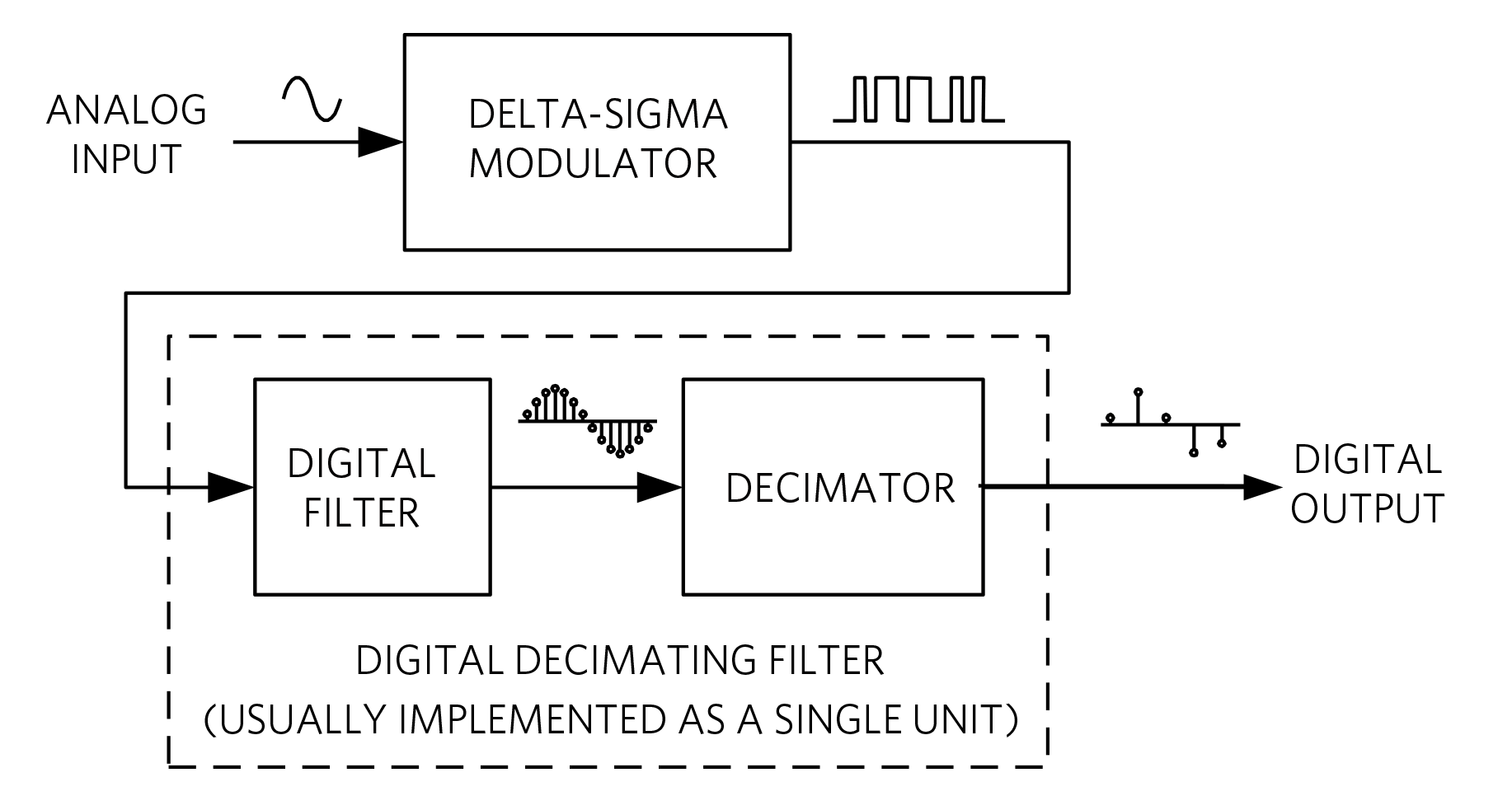 Figure 4 : le CAN de base convertit la tension d'entrée en un modulateur . (Source :Maxim Integrated)
Figure 4 : le CAN de base convertit la tension d'entrée en un modulateur . (Source :Maxim Integrated)
Le ADC de la figure 4 convertit la tension d'entrée en un modulateur . Le modulateur crée un train d'impulsions d'un bit en forme de bruit qui représente la tension d'entrée analogique. Le convertisseur accumule ensuite le train d'impulsions d'un bit et, grâce au suréchantillonnage, effectue divers filtrages numériques sur le signal. Avec le temps, le filtre rejette le bruit à haute fréquence et produit des résultats multi-bits jusqu'à 24 bits. Le convertisseur envoie ces résultats à la borne de sortie d'un microcontrôleur externe.
ΔΣ modulateur
Le modulateur démarre le processus de réduction du bruit de l'ADC. Un examen attentif de ce modulateur révèle rapidement d'où vient l'étiquette ΔΣ (Figure 5).
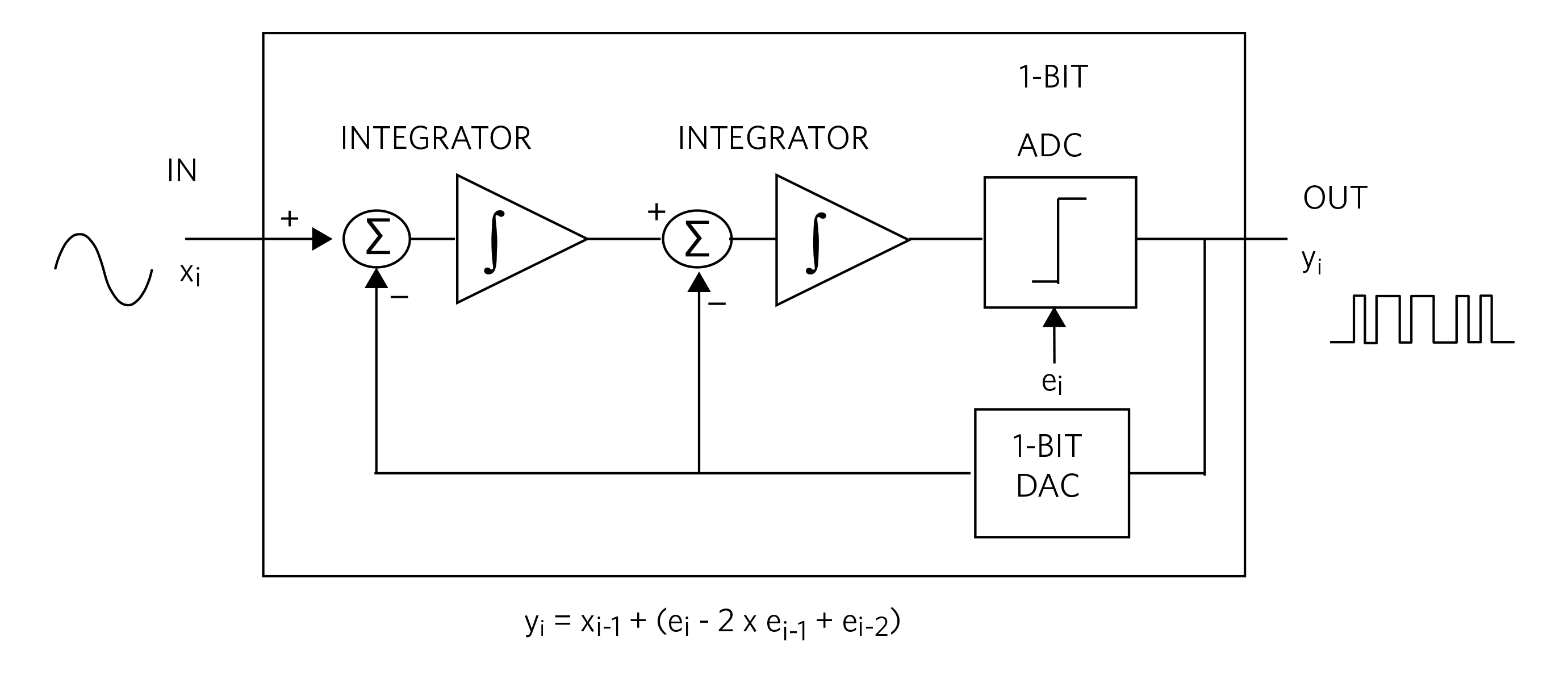 Figure 5 :Le modulateur de second ordre comprend un système de rétroaction contenant une fonction Δ frontale suivie de deux intégrateurs (fonction Σ). (Source :Maxim Integrated)
Figure 5 :Le modulateur de second ordre comprend un système de rétroaction contenant une fonction Δ frontale suivie de deux intégrateurs (fonction Σ). (Source :Maxim Integrated)
Dans la figure 5, après les deux intégrateurs, le signal est converti via un CAN 1 bit avec un taux d'échantillonnage égal à la fréquence d'échantillonnage (FS ) puis renvoie via un DAC 1 bit avec la même fréquence d'échantillonnage aux entrées des deux intégrateurs. Dans ce système, il y a une injection de bruit de quantification (ei ) avec l'ADC 1 bit. Selon la formule au bas de la figure 5, le bruit apparaît à la sortie avec le bruit des conversions précédentes.
Le modulateur génère un effet de mise en forme du bruit sur l'accumulation du signal à la sortie du modulateur. Cet effet de mise en forme du bruit façonne le bruit de quantification de conversion 1 bit en fréquences plus élevées (Figure 6).
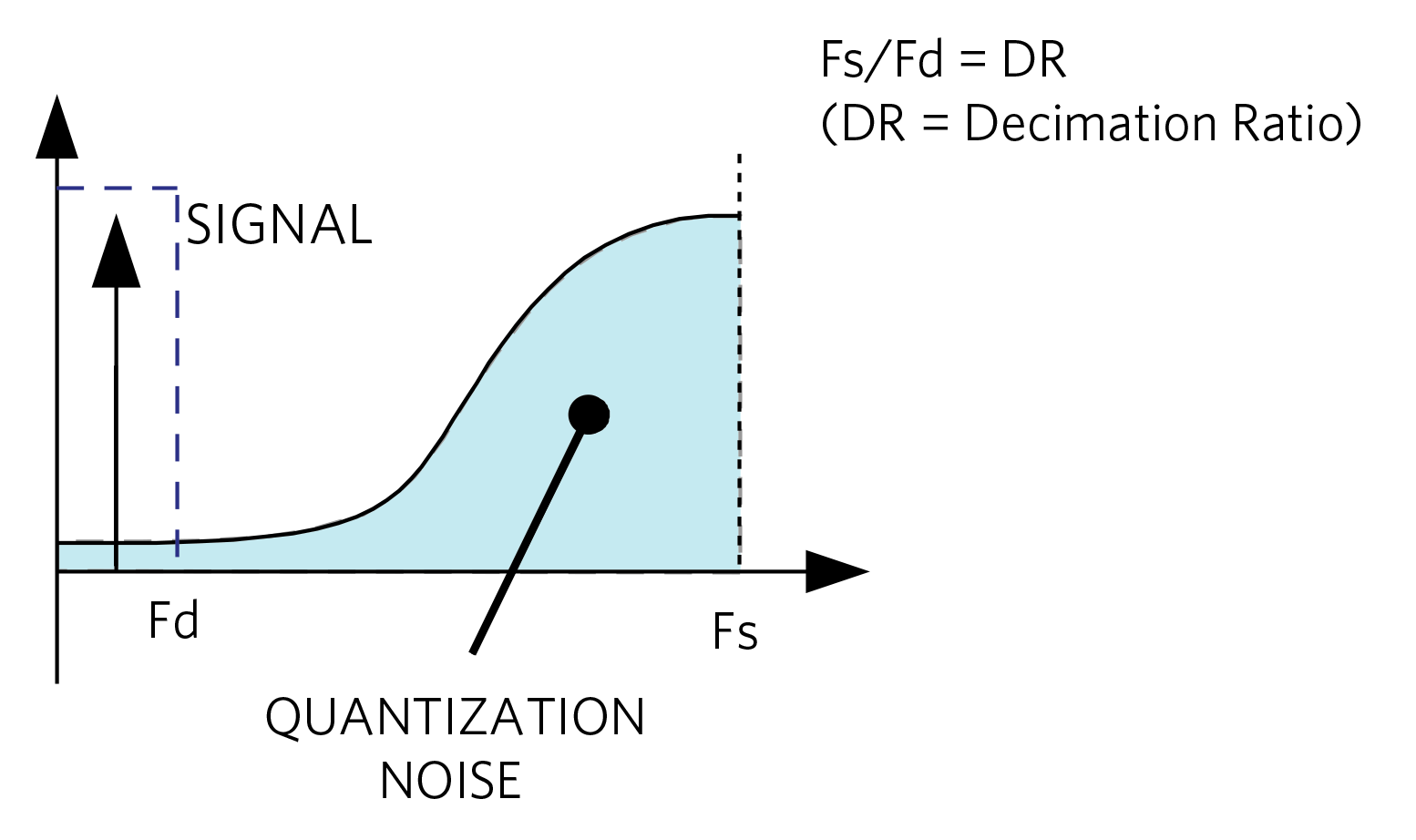 Figure 6 :Le bruit à la sortie du modulateur crée une réponse en forme de bruit. (Source :Maxim Integrated)
Figure 6 :Le bruit à la sortie du modulateur crée une réponse en forme de bruit. (Source :Maxim Integrated)
Dans la figure 6, la fréquence de Nyquist pour le système est la fréquence d'échantillonnage du modulateur, FS . L'ordre du modulateur détermine le niveau du bruit de quantification sur la fréquence (Figure 7).
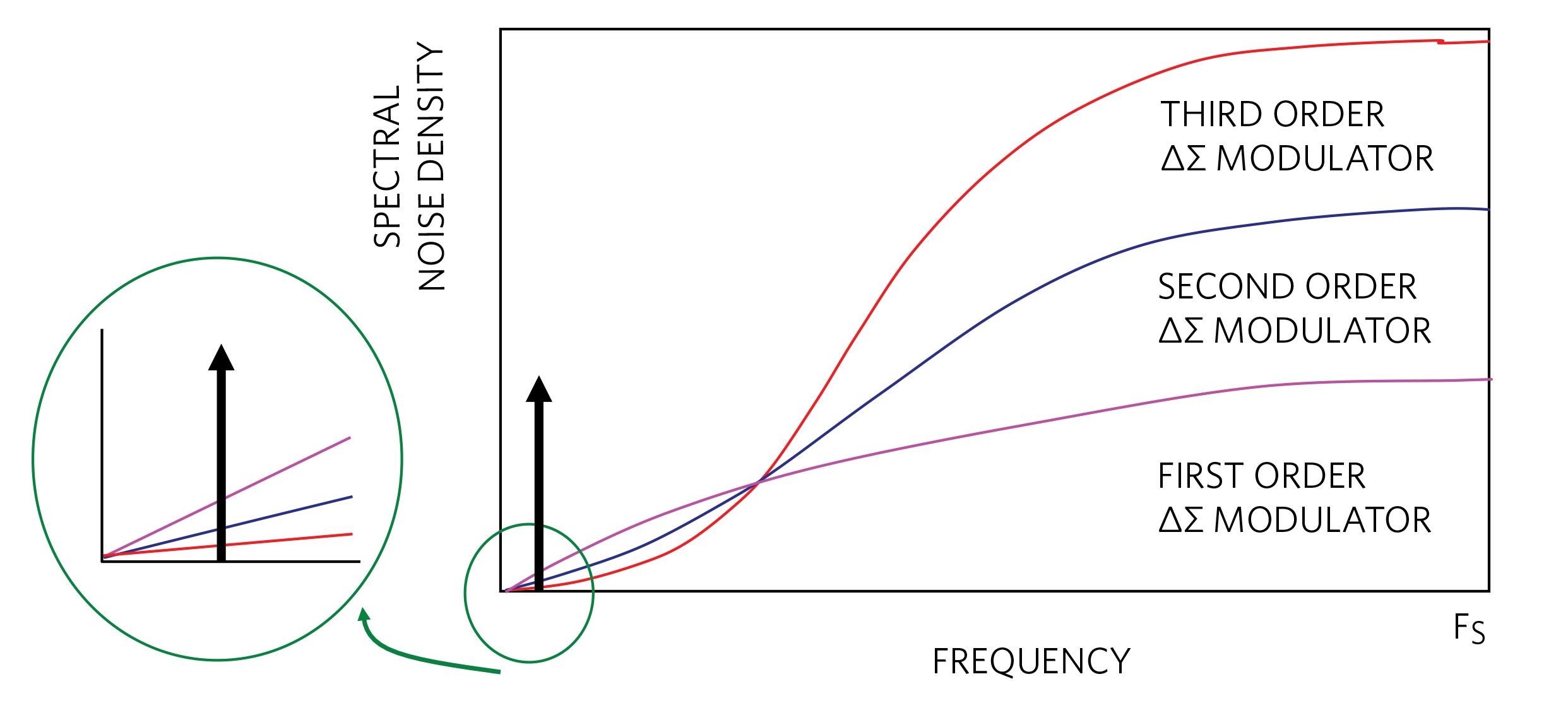
Figure 7 :Ce graphique montre la capacité de mise en forme du bruit des modulateurs de premier, deuxième et troisième ordre. (Source :Maxim Integrated)
Sur la figure 7, le bruit de quantification des modulateurs d'ordre inférieur est plus élevé près du courant continu et plus faible à haute fréquence. Le ΔΣ ADC collecte ou sur-échantillonne le flux de sortie 1 bit des modulateurs et exerce un filtrage numérique passe-bas.
Filtre numérique/décimation
Avec le noyau ΔΣ ADC, deux actions se produisent pour réduire le bruit du système. Le modulateur façonne avec succès son bruit de quantification à des fréquences plus élevées et le filtre numérique/de décimation atténue le bruit à haute fréquence.
Le débit de données de sortie de l'ADC, tel que dicté par la fréquence de coupure du filtre passe-bas numérique suivante, est FD . La réponse en fréquence du filtre numérique/de décimation (ligne pointillée sur la figure 4) atténue avec succès le bruit de fréquence plus élevée.
Terminé ΔΣ Image ADC
Un ADC fonctionnel complet au cœur nécessite un modulateur et des filtres numériques Sinc et à réponse impulsionnelle finie (FIR) (Figure 8).
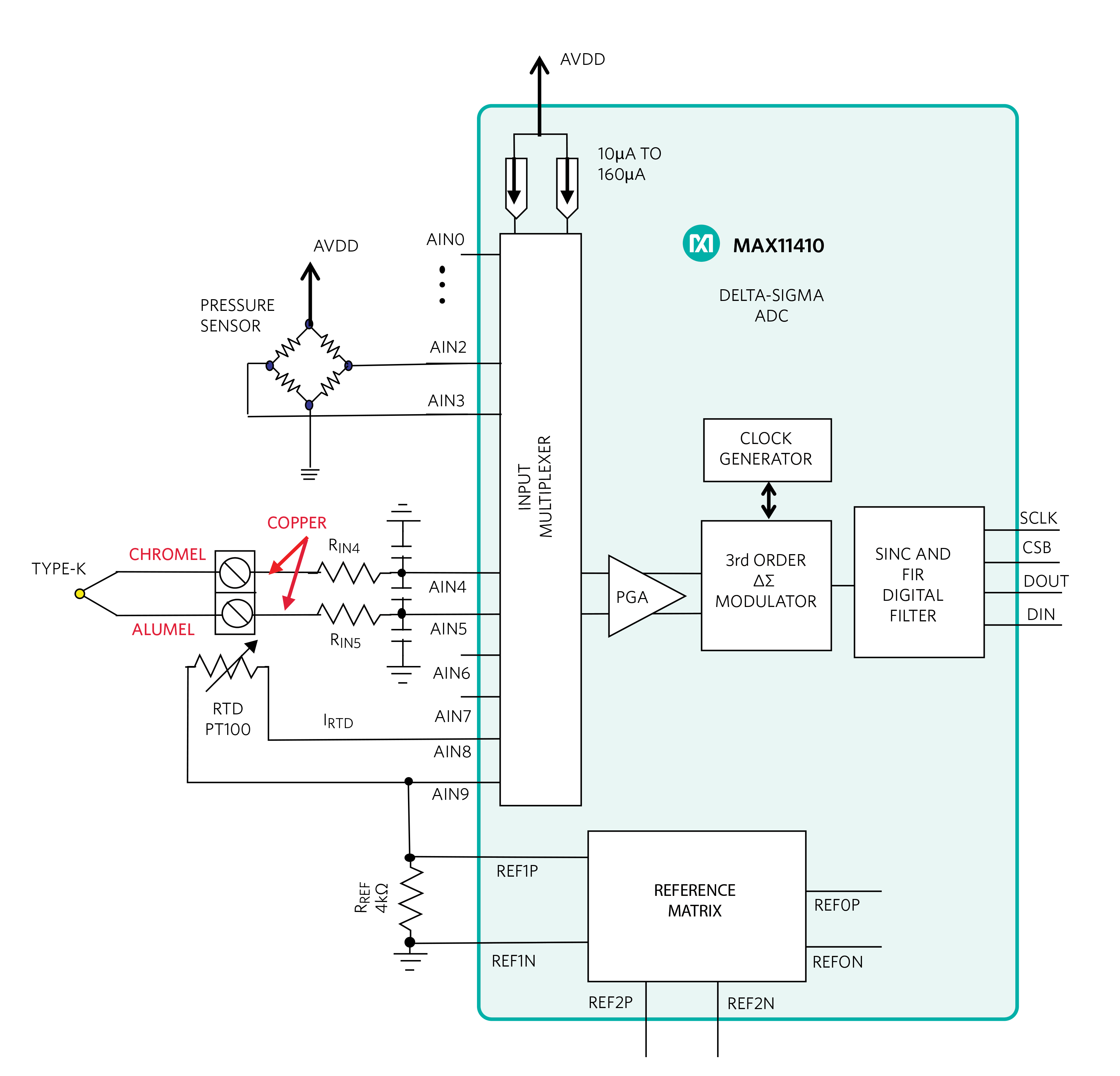
Figure 8 : Ce diagramme montre un CAN complet en fonctionnement avec des entrées de capteur de pression et de capteur de température. (Source :Maxim Integrated)
Dans le schéma fonctionnel core ΔΣ ADC (Figure 4), il y a un filtre numérique/de décimation. Le ΔΣ ADC réel de la figure 8 a les filtres numériques communs Sinc et FIR, qui complètent l'image à faible bruit du convertisseur.
Le filtre numérique Sinc remplit une fonction de filtre passe-bas. Une conception de filtre de premier ordre s'installe dans une période de mot de données. Le filtre Sinc de quatrième ordre ou Sinc 4 s'installe en quatre périodes de mots de données. La forme du filtre du domaine fréquentiel apparaît avec des creux sur la fréquence (Figure 9).

Figure 9 : Ces graphiques montrent la réponse en fréquence d'un filtre Sinc de troisième ordre (Sinc
3
). (Source :Maxim intégré)
Sur la figure 9, l'atténuation la plus faible peut être programmée pour correspondre à des fréquences appropriées telles que des multiples de 50 Hz ou 60 Hz. Le dispositif de la figure 8 implémente un Sinc 4 filtre numérique.
Les caractéristiques arrondies des filtres numériques Sinc en font l'un des filtres numériques les plus simples à mettre en œuvre, ils sont donc très utiles dans les applications à signaux mixtes. Cependant, il existe des applications où des angles plus vifs sont préférables. Le filtre FIR offre des angles plus nets avec un avantage supplémentaire de stabilité. Le ΔΣ CAN de la figure 8 possède un filtre 50 Hz/60 Hz qui fournit une réjection de plus de 90 dB à 50 Hz et 60 Hz à un débit de données de 16 échantillons par seconde.
Le CAN complet (Figure 8) possède des fonctions auxiliaires supplémentaires telles qu'un multiplexeur d'entrée, un amplificateur à gain programmable (PGA), un filtre numérique complexe, un générateur d'horloge et une matrice de référence. Avec un RDT PT100, une source de courant de 160 A et un gain PGA de 128, le MAX11410 ΔΣ ADC offre une plage d'entrée de 1,234 V à 2,837 V. Avec ce convertisseur 24 bits dans un Sinc 4 configuration, la taille du LSB de tension est de 0,039 μVRMS . La précision de la température s'étend sur une plage de ±100 °C et la précision du RTD est d'environ 4,7 °C/bit.
Cet article a présenté les problèmes associés à la réalisation d'une interface de cellule de température et de pression précise avec un ADC pour l'électronique pétrolière, gazière et pétrolière. Le circuit d'application utilise une pression, un thermocouple et un capteur RTC pour réaliser une conversion d'appareil unique, où les spécifications clés sont le bruit, un multiplexeur d'entrée et le coût de la nomenclature (BOM).
>> Cet article a été initialement publié le notre site frère, EDN.
Capteur
- Profil de température Raspberry Pi avec LabVIEW
- Bibliothèque Python du capteur de température TMP006 utilisant Raspberry pi,
- Capteur de température Python et Raspberry Pi
- Raspberry Pi lisant la température et la pression BMP085
- Système de contrôle d'appareil basé sur la température utilisant LM35
- Surveillez la température de votre maison à l'aide de votre Raspberry Pi
- Capteurs analogiques sur le Raspberry Pi utilisant un MCP3008
- Blog :Avantages de l'utilisation d'un patch de refroidissement portable
- Les avantages de l'utilisation de la vision robotique pour les applications d'automatisation