


Construction de relais
Électricité et magnétisme
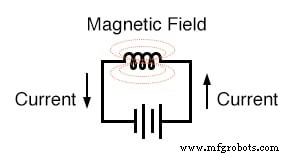
Un courant électrique à travers un conducteur produira des lignes de champ magnétique qui entourent le conducteur. Si ce conducteur est enroulé dans une forme de bobine, le champ magnétique produit sera orienté sur la longueur de la bobine. Plus le courant est grand, plus la force du champ magnétique est grande, tous les autres facteurs étant égaux :
Inducteurs et champs magnétiques
Les inducteurs réagissent contre les changements de courant en raison de l'énergie stockée dans ce champ magnétique. Lorsque nous construisons un transformateur à partir de deux bobines d'inductance autour d'un noyau de fer commun, nous utilisons ce champ pour transférer l'énergie d'une bobine à l'autre.
Cependant, il existe des utilisations plus simples et plus directes des champs électromagnétiques que les applications que nous avons vues avec les inductances et les transformateurs.
Le champ magnétique produit par une bobine de fil porteur de courant peut être utilisé pour exercer une force mécanique sur n'importe quel objet magnétique, tout comme nous pouvons utiliser un aimant permanent pour attirer des objets magnétiques, sauf que cet aimant (formé par la bobine) peut être allumé ou éteint en allumant ou en éteignant le courant à travers la bobine.
Soénoïdes
Si nous plaçons un objet magnétique près d'une telle bobine dans le but de faire bouger cet objet lorsque nous alimentons la bobine avec du courant électrique, nous avons ce qu'on appelle un solénoïde. L'objet magnétique mobile s'appelle une armature, et la plupart des armatures peuvent être déplacées avec un courant continu (CC) ou un courant alternatif (CA) alimentant la bobine.
La polarité du champ magnétique n'a pas d'importance pour attirer une armature de fer. Les solénoïdes peuvent être utilisés pour ouvrir électriquement les loquets de porte, ouvrir ou fermer des vannes, déplacer des membres robotiques et même actionner des mécanismes de commutation électrique. Cependant, si un solénoïde est utilisé pour actionner un ensemble de contacts de commutation, nous avons un appareil si utile qu'il mérite son propre nom :le relais.
Relais
Les relais sont extrêmement utiles lorsque nous avons besoin de contrôler une grande quantité de courant et/ou de tension avec un petit signal électrique.
La bobine de relais qui produit le champ magnétique peut ne consommer que des fractions de watt de puissance, tandis que les contacts fermés ou ouverts par ce champ magnétique peuvent être capables de conduire des centaines de fois cette quantité de puissance vers une charge. En effet, un relais agit comme un amplificateur binaire (marche ou arrêt).
Tout comme avec les transistors, la capacité du relais à contrôler un signal électrique avec un autre trouve une application dans la construction de fonctions logiques. Ce sujet sera traité plus en détail dans une autre leçon. Pour l'instant, la capacité « d'amplification » du relais sera explorée.
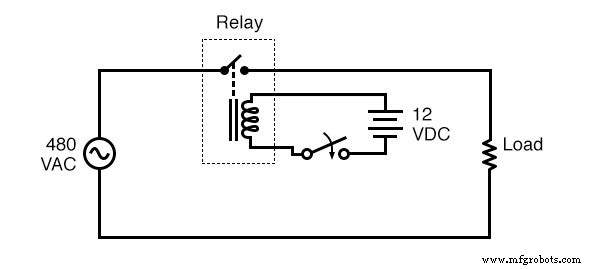
Dans le schéma ci-dessus, la bobine du relais est alimentée par la source basse tension (12 V CC), tandis que le contact unipolaire unidirectionnel (SPST) interrompt le circuit haute tension (480 V CA).
Il est fort probable que le courant requis pour alimenter la bobine du relais soit des centaines de fois inférieur au courant nominal du contact. Les courants de bobine de relais typiques sont bien inférieurs à 1 A, tandis que les valeurs nominales de contact typiques pour les relais industriels sont d'au moins 10 A.
Assemblage de relais
Un ensemble bobine/armature de relais peut être utilisé pour actionner plus d'un jeu de contacts. Ces contacts peuvent être normalement ouverts, normalement fermés ou toute combinaison des deux.
Comme pour les commutateurs, l'état « normal » des contacts d'un relais est cet état lorsque la bobine est désactivée, tout comme vous trouveriez le relais sur une étagère, non connecté à un circuit.
Les contacts de relais peuvent être des plots à ciel ouvert en alliage métallique, des tubes de mercure ou même des lames magnétiques, tout comme avec d'autres types d'interrupteurs. Le choix des contacts dans un relais dépend des mêmes facteurs qui dictent le choix des contacts dans d'autres types de commutateurs.
Les contacts à l'air libre sont les meilleurs pour les applications à courant élevé, mais leur tendance à se corroder et à produire des étincelles peut causer des problèmes dans certains environnements industriels. Les contacts au mercure et à lames sont sans étincelle et ne se corrodent pas, mais leur capacité de transport de courant a tendance à être limitée.
Exemples de relais physiques
Voici trois petits relais (d'environ deux pouces de hauteur chacun), installés sur un panneau dans le cadre d'un système de contrôle électrique dans une usine municipale de traitement des eaux :

Les unités de relais présentées ici sont appelées « base octale », car elles se branchent dans des prises correspondantes, les connexions électriques étant sécurisées via huit broches métalliques sur le bas du relais. Les bornes à vis que vous voyez sur la photo où les fils se connectent aux relais font en fait partie de l'assemblage de la prise, dans laquelle chaque relais est branché.
Ce type de construction facilite le retrait et le remplacement du ou des relais en cas de panne.
Autres avantages des relais
Outre la possibilité de permettre à un signal électrique relativement faible de commuter un signal électrique relativement important, les relais offrent également une isolation électrique entre la bobine et les circuits de contact. Cela signifie que le circuit de la bobine et le ou les circuits de contact sont isolés électriquement l'un de l'autre.
Un circuit peut être en courant continu et l'autre en courant alternatif (comme dans l'exemple de circuit illustré plus haut), et/ou ils peuvent être à des niveaux de tension complètement différents, entre les connexions ou entre les connexions à la terre.
Courant d'appel et courant de décrochage
Alors que les relais sont essentiellement des dispositifs binaires, qu'ils soient complètement allumés ou complètement éteints, il existe des conditions de fonctionnement où leur état peut être indéterminé, tout comme avec les portes logiques à semi-conducteur. Pour qu'un relais "attire" positivement l'armature pour actionner le(s) contact(s), il doit y avoir une certaine quantité minimale de courant à travers la bobine.
Cette quantité minimale est appelée courant d'appel, et elle est analogue à la tension d'entrée minimale requise par une porte logique pour garantir un état « haut » (généralement 2 V pour le TTL, 3,5 V pour le CMOS).
Une fois que l'armature est rapprochée du centre de la bobine, cependant, il faut moins de flux de champ magnétique (moins de courant de bobine) pour la maintenir là. Par conséquent, le courant de la bobine doit chuter en dessous d'une valeur nettement inférieure au courant d'appel avant que l'armature « retombe » dans sa position de ressort et que les contacts reprennent leur état normal.
Ce niveau de courant est appelé courant de décrochage, et il est analogue à la tension d'entrée maximale qu'une entrée de porte logique permettra de garantir un état « bas » (typiquement 0,8 Volts pour TTL, 1,5 Volts pour CMOS).
L'hystérésis, ou la différence entre les courants d'appel et de chute, entraîne un fonctionnement similaire à une porte logique de déclenchement de Schmitt. Les courants d'appel et de décrochage (et les tensions) varient considérablement d'un relais à l'autre et sont spécifiés par le fabricant.
AVIS :
- Un solénoïde est un dispositif qui produit un mouvement mécanique à partir de l'excitation d'une bobine d'électro-aimant. La partie mobile d'un solénoïde est appelée armature .
- Un relais est un solénoïde configuré pour actionner les contacts de l'interrupteur lorsque sa bobine est sous tension.
- Retrait Le courant est la quantité minimale de courant de bobine nécessaire pour actionner un solénoïde ou un relais à partir de sa position « normale » (hors tension).
- Abandon le courant est le courant de bobine maximum en dessous duquel un relais sous tension reviendra à son état « normal ».
FICHES DE TRAVAIL CONNEXES :
-
Feuille de travail de base sur les relais électromagnétiques
Technologie industrielle
- Construction de la batterie
- Matériaux et construction du circuit flexible
- 5 Ws d'un métamatériau portable
- Accidents et blessures de construction courants
- Qu'est-ce qu'un embrayage magnétique ?
- Qu'est-ce qu'un Strongback ?
- Entretien des équipements de construction
- AuNi18
- Innovations dans les robots de construction