


Robot de désinfection avec des lumières ultraviolettes
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
Outils et machines nécessaires
 |
|
À propos de ce projet
Introduction au Robot
Ultraviolet Germicide Robot (UV Robot) est un robot télécommandé équipé d'un système de lumière UV. Le système contient un véhicule robot en mouvement et un contrôleur de station au sol (GCS). L'opérateur peut contrôler le robot à l'aide du joystick du contrôleur de la station au sol (GCS) tout en observant l'alimentation de la caméra du robot.
Le robot peut désinfecter et tuer des maladies, des virus, des bactéries et d'autres types de micro-organismes organiques nocifs dans l'environnement, avec la lumière ultraviolette, en décomposant leur structure d'ADN. Actuellement, plusieurs pays ont testé avec succès ces robots pour désinfecter leurs hôpitaux, transports publics, bureaux et autres lieux publics. Nous avons mis en œuvre ce robot UV de manière rentable pour étendre le processus de désinfection aux lieux publics.
Pourquoi pas des liquides désinfectants ?

La méthode la plus courante et la plus populaire pour désinfecter les lieux publics consiste à vaporiser des liquides désinfectants à base d'alcool à 70 %. Récemment, l'Organisation mondiale de la santé (OMS) a annoncé qu'il est vraiment nocif d'utiliser régulièrement des liquides désinfectants dans les lieux publics. Cela peut causer des problèmes au système respiratoire en raison de leur forte odeur, provoquer une irritation de la peau et entraîner des déséquilibres dans l'environnement.
De plus, cette méthode est associée à un coût énorme en matériaux et en main-d'œuvre au quotidien.
Avantages du Robot UV
- Coût unique (pas besoin de remplir d'alcool ou de chlore liquide).
- Peut être utilisé pour désinfecter les surfaces, les combinaisons médicales, les masques médicaux et d'autres équipements médicaux.
- Réduire le temps de désinfection de 60 % par rapport aux méthodes de désinfection à base de liquide. (Le temps de séchage est considérablement élevé lorsqu'il est utilisé dans des environnements où des matériaux textiles sont disponibles).
- Capacité d'utilisation pour les environnements avec équipement électronique.
- Un opérateur peut couvrir une grande surface. (Pas besoin de plusieurs personnes comme dans les sprays liquides)
- Nous avons testé et prouvé un taux de désinfection de 99,997% pour ce robot en collaboration avec un laboratoire de microbiologie d'une université locale. (Expliqué dans la dernière section)
Irradiation germicide ultraviolette (UVGI)
L'irradiation germicide ultraviolette (UVGI) est une méthode de désinfection qui utilise la lumière ultraviolette à courte longueur d'onde (ultraviolet C ou UVC) pour tuer ou inactiver les micro-organismes en détruisant les acides nucléiques et en perturbant leur ADN, les laissant incapables d'exercer des fonctions cellulaires vitales. Les UVC sont absorbés par les bases d'ARN et d'ADN et peuvent provoquer la fusion photochimique de deux pyrimidines adjacentes en dimères liés de manière covalente, qui deviennent alors des bases sans appariement.
UVGI est utilisé dans une variété d'applications, telles que la purification des aliments, de l'air et de l'eau. L'UVGI peut être utilisé pour prévenir la propagation de certaines maladies infectieuses. Les lampes à décharge au mercure (Hg) à basse pression et les LED sont couramment utilisées dans les applications UVGI et émettent un rayonnement ultraviolet-C à ondes courtes (100 à 280 nanomètres), principalement à 254 nm.
Chaque type de micro-organisme nécessite un dosage différent de lumière UV pour inactiver sa fonctionnalité. Compte tenu de la situation de Covid-19, l'inactivation du même virus à l'aide de la lumière UV est considérée ici. Dans la plupart des documents de recherche et des articles, les groupes de recherche ont mentionné la lumière UV requise pour le processus de stérilisation en termes de « joule par mètre carré » ou « joule par centimètre carré ». Mais lors de l'examen des paramètres et des spécifications de la lumière UV, les fabricants ont donné l'intensité de la lumière UV en termes de "Microwatt (uW) par centimètre carré" à une distance de 1 mètre.
L'unité "Watt(W)" représente l'énergie émise dans un délai d'une seconde. Le microwatt par centimètre carré correspond à l'énergie qui traverse une surface d'un centimètre carré en une seconde.
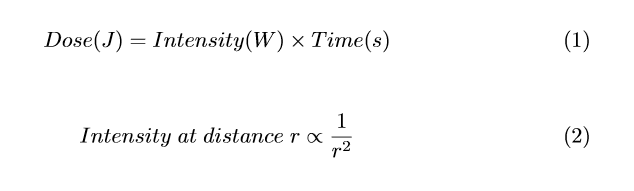
Équation 1 montre la relation entre le dosage et l'intensité. Il conclut que différents dosages peuvent être obtenus en variant le temps d'exposition à la même source de lumière UV.
La relation entre l'intensité UV et la distance est représentée par l'équation 2. D'après cela, on peut conclure que l'intensité des UV diminue avec la distance de la source lumineuse.
Selon Wikipedia, une dose de 8 mJ peut inactiver la plupart des virus.
Comprendre la fonctionnalité du robot
Le système global est un peu complexe car nous avons ajouté quelques fonctionnalités et dispositifs de sécurité pour se conformer aux normes de l'industrie. Avant d'expliquer la procédure de mise en œuvre, il est bon de comprendre le fonctionnement du système.
Le robot a 3 composants principaux.
1. Le véhicule terrestre

Cette partie est mue par deux roues actionnées par des motoréducteurs à courant continu (un robot à entraînement différentiel). Il y a deux roulettes à l'avant et à l'arrière pour maintenir l'équilibre. Nous avons placé le système de contrôle électronique et la batterie, qui est une batterie plomb-acide 12V 35Ah à l'intérieur du véhicule terrestre.
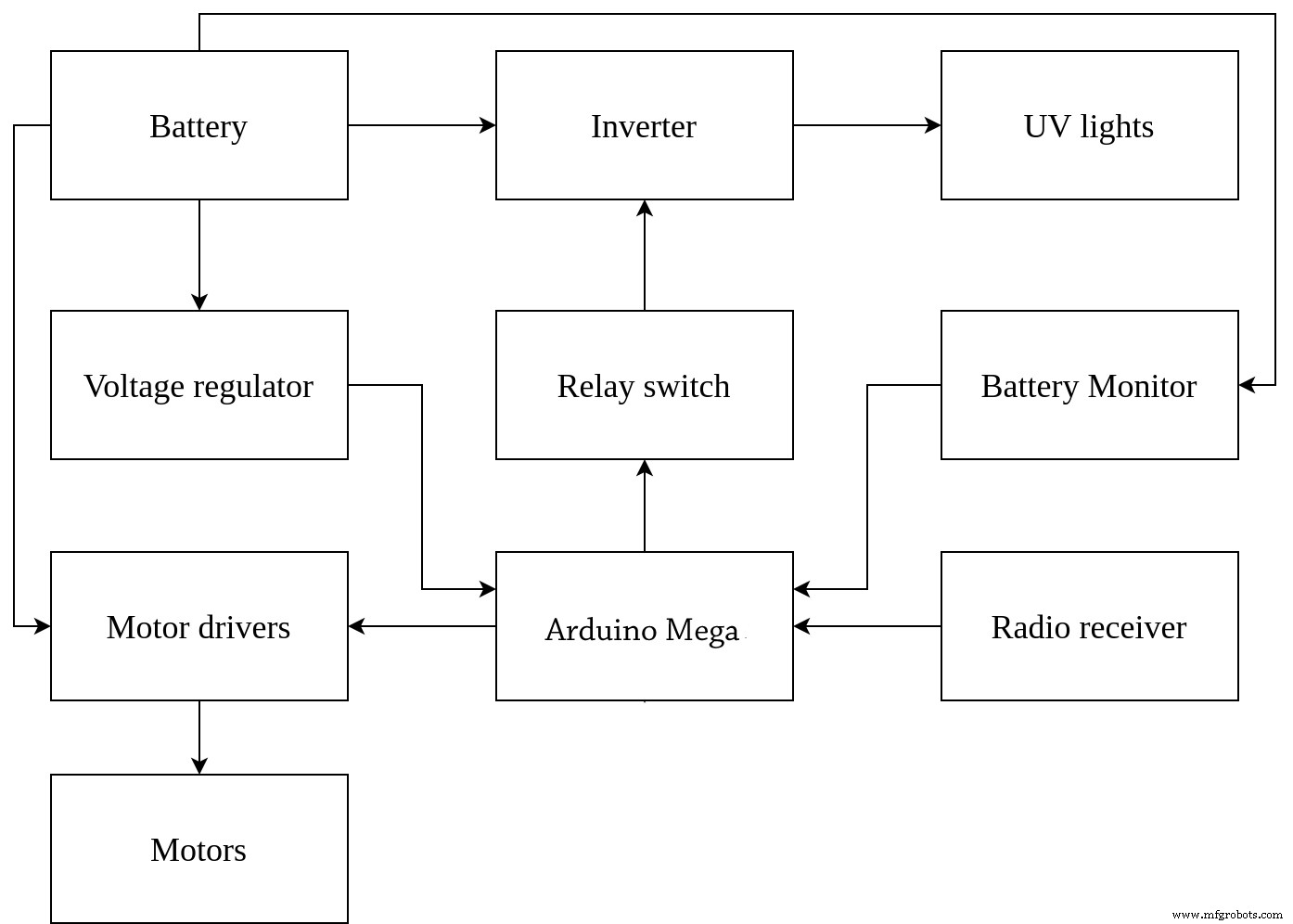
Arduino Mega est alimenté par la batterie principale via un module régulateur de tension pour réduire la tension de 12V à 5V. Un récepteur radio RC à quatre canaux avec sorties PWM est connecté à la carte Mega. Les moteurs sont entraînés par un pilote de moteur à pont en H à double canal qui est connecté à la carte Arduino. Un onduleur est connecté entre les lampes UV et la batterie et contrôlé à l'aide d'un interrupteur à relais connecté à la carte Arduino.
2. La tour de lumière UV
Nous avons utilisé des ampoules UV fluorescentes qui nécessitent un ballast électronique séparé pour alimenter l'ampoule. La tour d'éclairage contient 6 ampoules UV qui sont placées autour d'un cylindre en aluminium qui est fabriqué à partir d'une feuille d'aluminium en la roulant. Ce cylindre en aluminium agit comme un réflecteur pour les rayons UV.
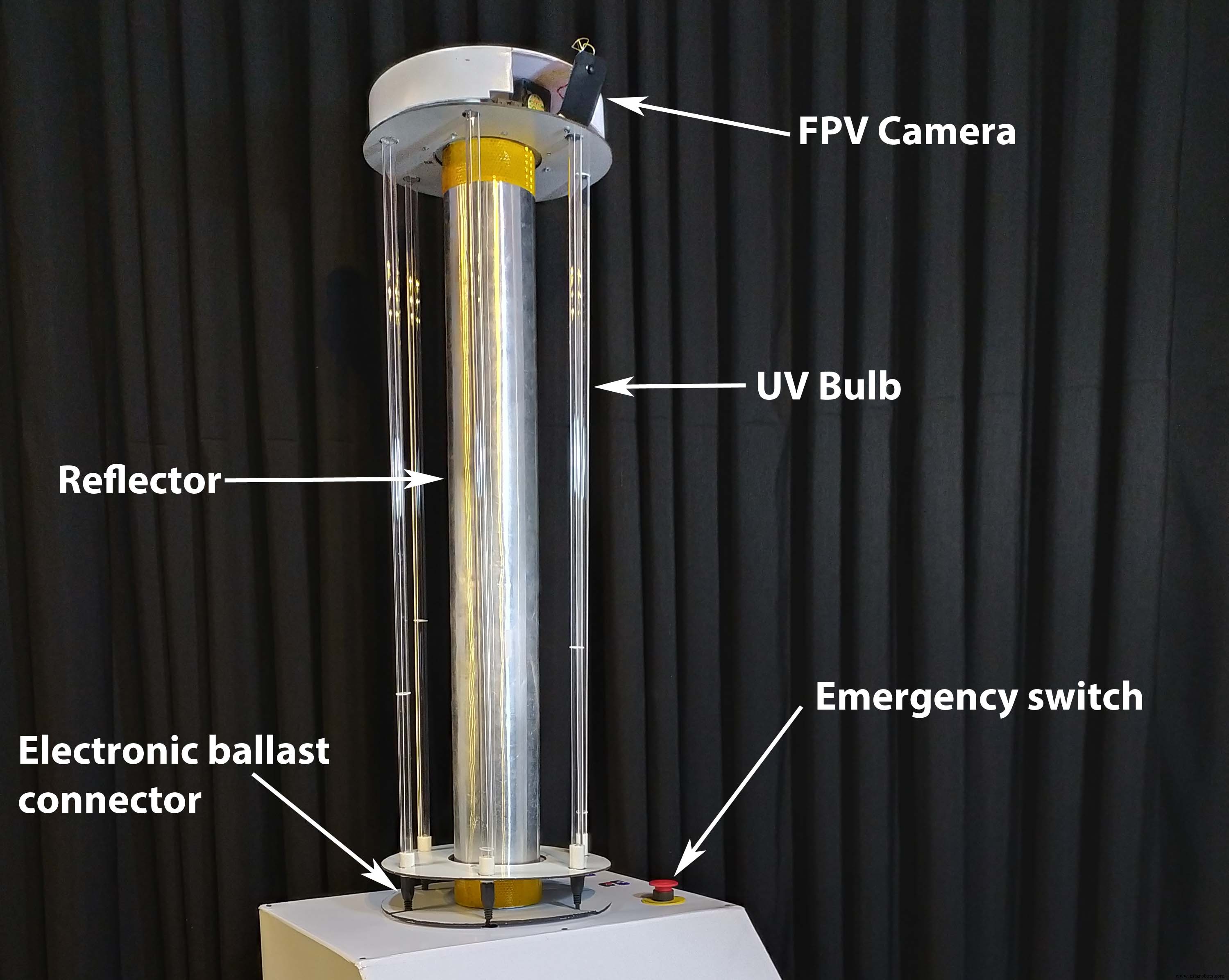
Tous les ballasts électroniques sont placés à l'intérieur du cylindre en aluminium. Au sommet de la tour, il y a une caméra FPV et un émetteur FPV pour transmettre le flux vidéo au GCS. La tour UV est fixée au sommet du véhicule terrestre.
3. Contrôleur de station au sol

C'est la télécommande du robot. L'écran affiche les commentaires de la caméra reçus du robot. Le joystick est utilisé pour déplacer le robot. Les lampes UV peuvent être allumées et éteintes à l'aide de l'interrupteur UV. L'interrupteur d'armement agit comme un interrupteur de sécurité. Il réduit toutes les fonctionnalités du lors de la mise sous tension.
Allumer les lampes UV

Pour notre robot, nous avons sélectionné 6 ampoules UV avec les spécifications suivantes.
- Puissance - 55 w
- Longueur d'onde - 254 nm
- longueur - 890 mm
- diamètre du tube - 15 mm
- type - extrémité simple 4 broches
Ce ne sont pas des spécifications strictes, sauf la longueur d'onde. Le ballast électronique est connecté aux 4 broches de l'ampoule UV. Les ampoules UV s'allumeront lorsque le ballast électronique sera alimenté.
***La lumière UV est nocive pour la peau et les yeux humains. N'exposez pas vos yeux et votre peau pendant une période plus longue. Observer la lumière à travers le verre est la procédure la plus sûre car la lumière UV ne peut pas pénétrer dans le verre transparent.***
Système vidéo FPV
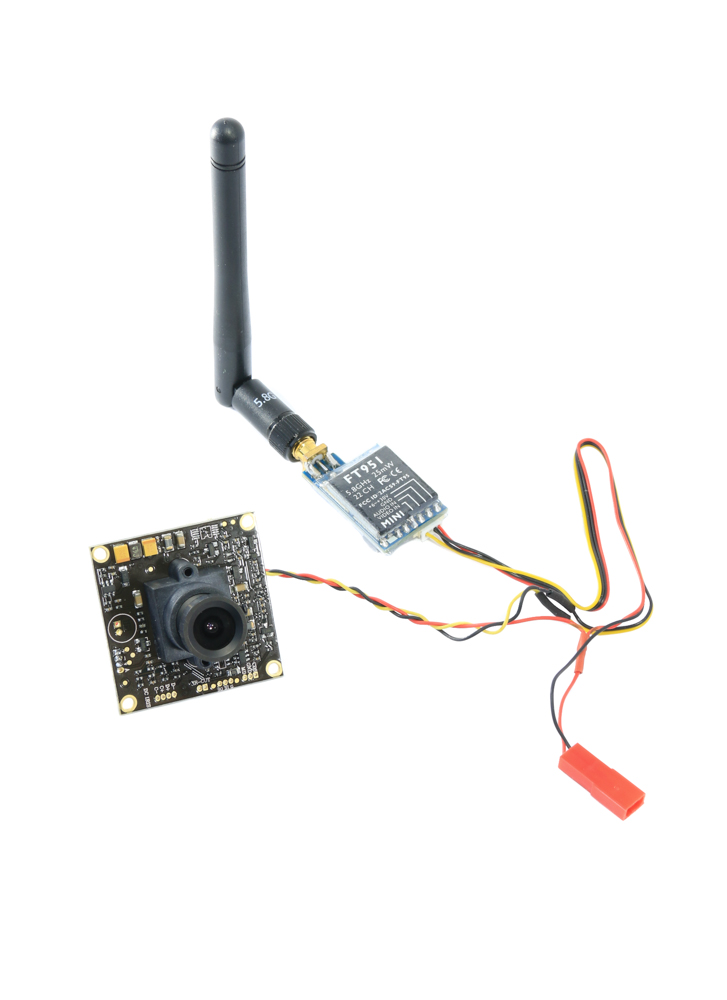

FPV les systèmes vidéo sont principalement utilisés dans les drones pour obtenir une vue à vol d'oiseau. Dans notre cas, l'utilisation d'un système FPV permet d'obtenir facilement le flux vidéo du robot sans aucun composant de programmation ou de soudure. Le robot dispose d'une caméra et d'un émetteur vidéo. Nous n'avons qu'à connecter l'alimentation à ce système et il commencera à transmettre le flux vidéo en utilisant 5,8 GHz.
Le GCS possède un écran LCD avec un récepteur vidéo 5,8 GHz intégré. Une fois que vous allumez l'écran, il commencera à afficher le flux de la caméra.
Construire le véhicule terrestre
La structure principale est faite de barres en acier de 0,75'. Voici la conception utilisée pour notre robot, mais ne vous y limitez pas. Modifiez le design en fonction de vos besoins.
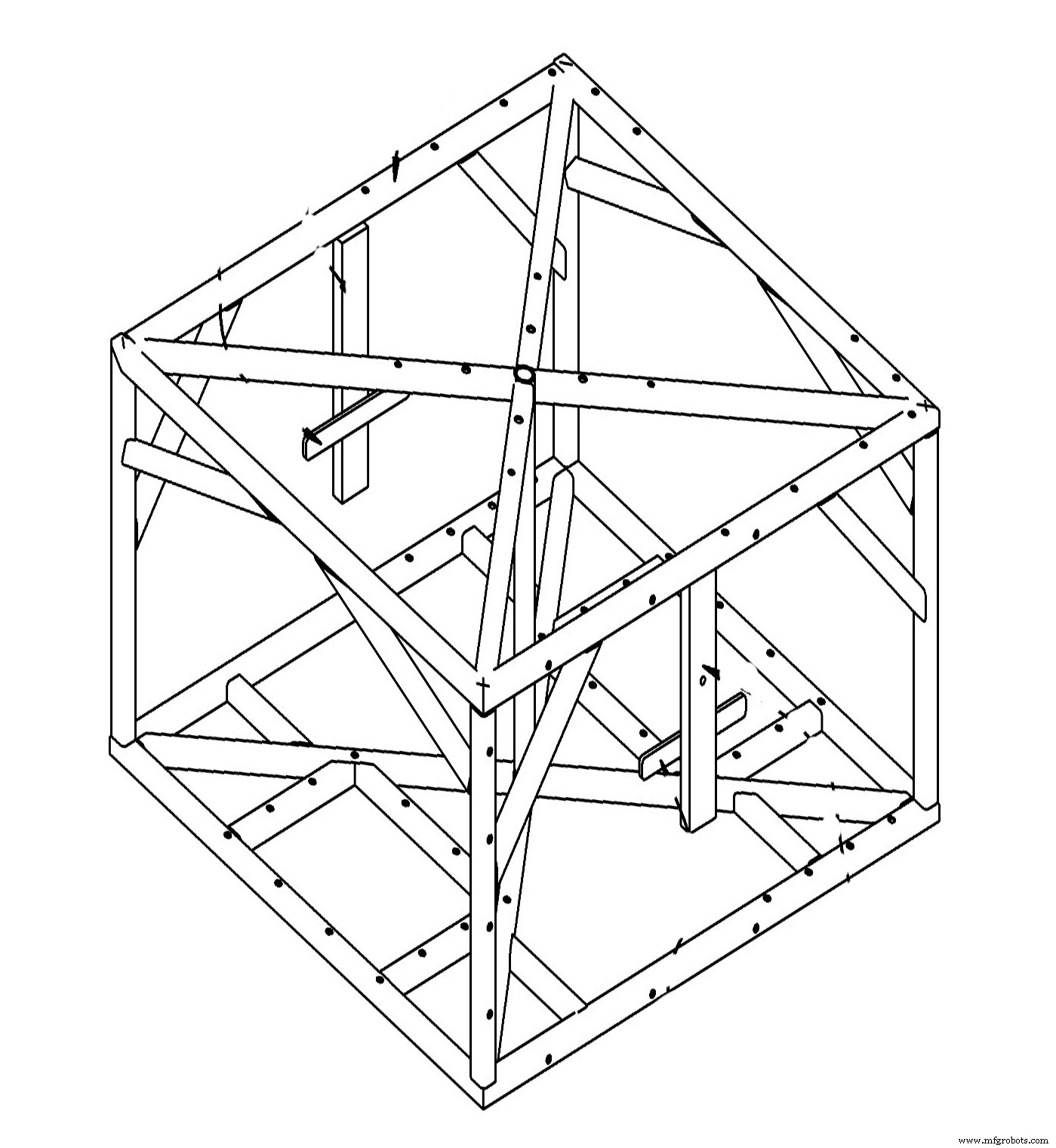
Le cadre doit avoir de l'espace et un mécanisme pour monter deux moteurs et deux roulettes en bas. À l'intérieur de la structure, il devrait y avoir un mécanisme pour verrouiller la batterie au plomb. Dans notre robot, nous avons utilisé des planches de revêtement pour couvrir le cadre.
Les fils des deux moteurs sont connectés aux broches de sortie du pilote de moteur. Cette procédure peut être facilement trouvée sur Internet, elle n'est donc pas destinée à décrire l'ensemble de la procédure.
Le schéma du système de contrôle électronique est joint en dernier. Canal 1 - canal 4 Les broches de signal PWM du récepteur RC sont connectées à la carte Arduino à partir des broches 18 - 21. Chaque canal est configuré de la manière suivante dans le code. Vous pouvez le modifier à votre guise.
- Ch 1 - commutateur UV
- Ch 2 - Interrupteur d'armement du robot
- Ch 3 - Commandes de déplacement avant/arrière
- Ch 4 - Commandes de virage à gauche/droite
Cela peut également être modifié lors de la création du GCS.
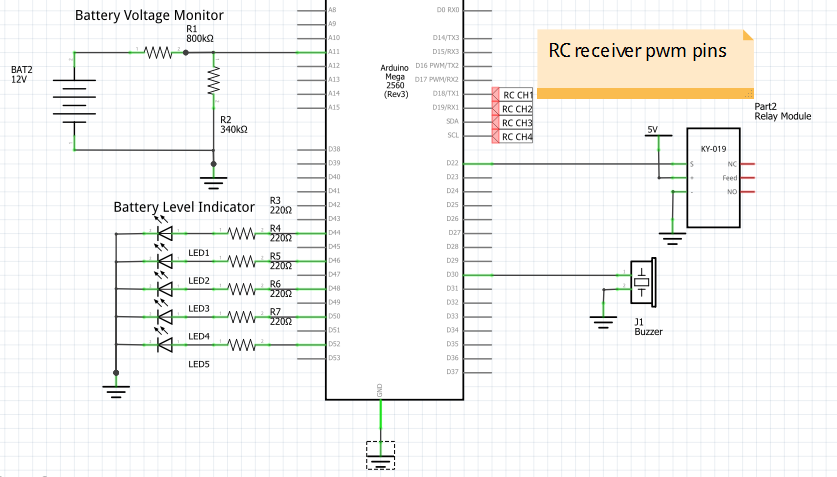
Les broches du pilote de moteur sont connectées à la broche Arduino 3 - 11 comme indiqué dans le schéma.
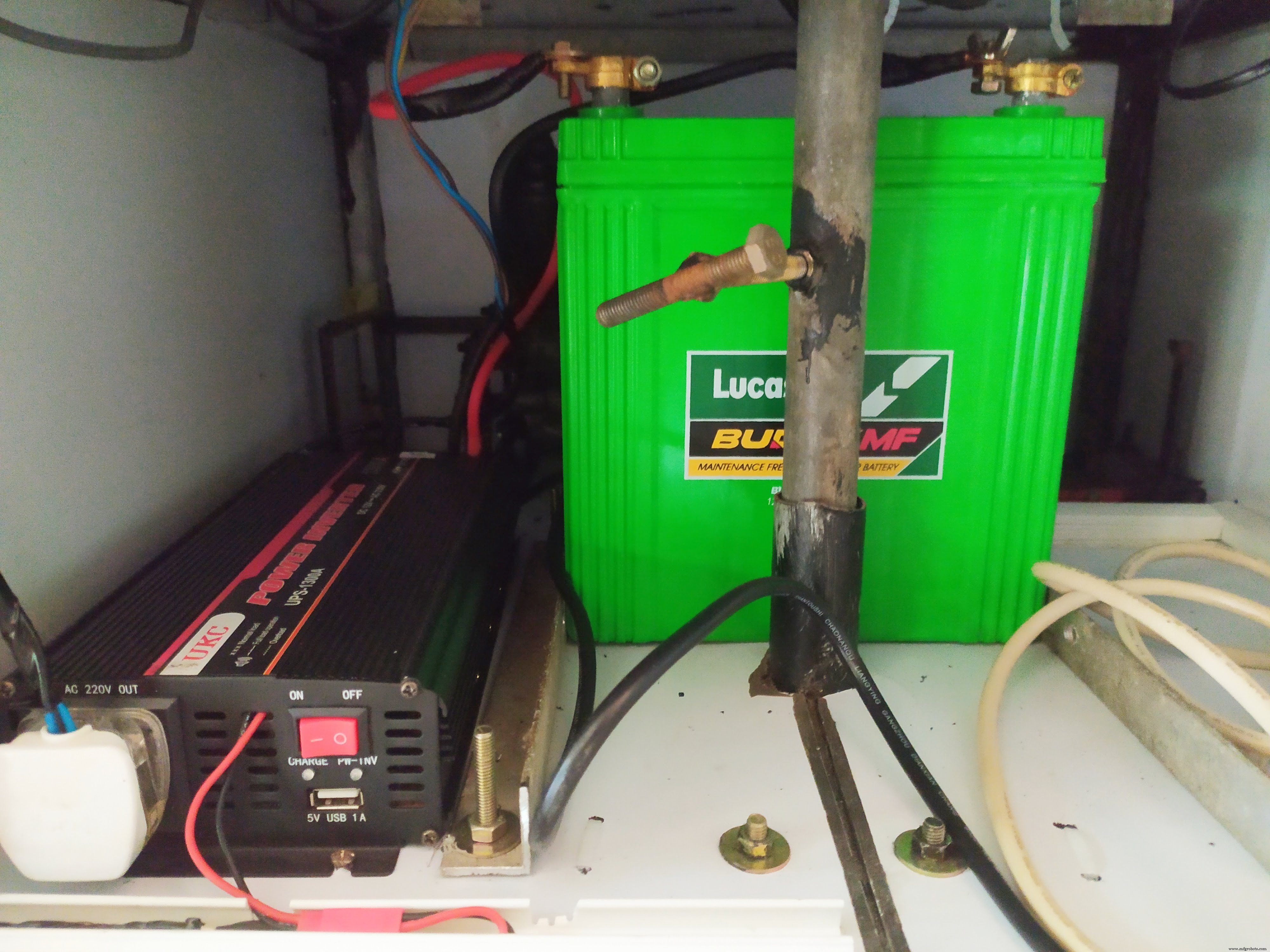
Pour convertir le 12v en AC 230V pour alimenter les lampes UV, un circuit inverseur est utilisé ici. Nous avons acheté un onduleur disponible dans le commerce avec un chargeur intégré. Cela permet d'éviter la complexité du système électronique en nous permettant de charger la batterie au plomb en utilisant les prises de courant existantes.

Dans notre cas, nous avons utilisé un onduleur à onde sinusoïdale modifiée qui a un rendement d'environ 70%. Pour alimenter tous les ballasts électroniques avec une efficacité de 70%, la puissance requise de l'onduleur est de 470W. Avec toutes les marges de sécurité, nous avons acheté un onduleur de 1 kW.,
Les bornes de la batterie sont connectées à l'entrée 12V et les ballasts E. sont connectés aux ports de sortie CA. L'interrupteur marche/arrêt est retiré. Il y a 3 fils disponibles dans le commutateur ; fil commun, fil de terre et le fil d'alimentation. Ces 3 fils sont connectés au commutateur de relais de la manière suivante pour contrôler les lumières UV de la carte Arduino.
- Câble commun -> Commun
- Câble de terre -> NC
- Alimentation sur fil -> NON
Nous avons inclus un interrupteur de mise sous tension du système, un interrupteur d'alimentation UV et un interrupteur d'arrêt d'urgence pour mettre le robot en conformité avec les normes industrielles.
Construire la tour de lumière UV
La partie médiane de la tour contient une feuille d'aluminium. Une feuille est roulée pour former un cylindre d'un diamètre de 15 cm. Deux planches de bardage en forme de cercle d'un diamètre de 30 cm sont placées en haut et en bas du cylindre. Ceux-ci sont utilisés comme support de lampe UV. Les deux panneaux de revêtement sont percés de trous de 19 mm pour s'adapter à la lumière UV. Les ballasts électroniques sont fixés à l'intérieur du cylindre en aluminium à l'aide de rubans adhésifs double face.


Le système de caméra FPV est monté au sommet de la tour et deux fils sont amenés vers le bas à travers le cylindre.
Construire la station de contrôle au sol

Voici les composants requis pour la station de contrôle au sol (GCS).
- Émetteur RC 2,4 GHZ 4 canaux
- Écran FPV
- 2 interrupteurs à bascule
- 1 interrupteur d'alimentation
- 18650 cellules de batterie
- Module de système de gestion de batterie à 3 cellules pour 18650
- Alimentation à découpage 12 V, 5 A
L'émetteur Rc contient 2 joysticks et plusieurs interrupteurs. Ici, notre intérêt se porte uniquement sur un joystick, le circuit et le voyant LED. Retirez le boîtier de l'émetteur et observez comment les joysticks sont détectés par le circuit. Chaque joystick contient deux potentiomètres qui sont connectés au circuit imprimé. En fonction de la position du joystick, le potentiomètre modifie sa résistance afin que le circuit puisse lire la position du joystick.
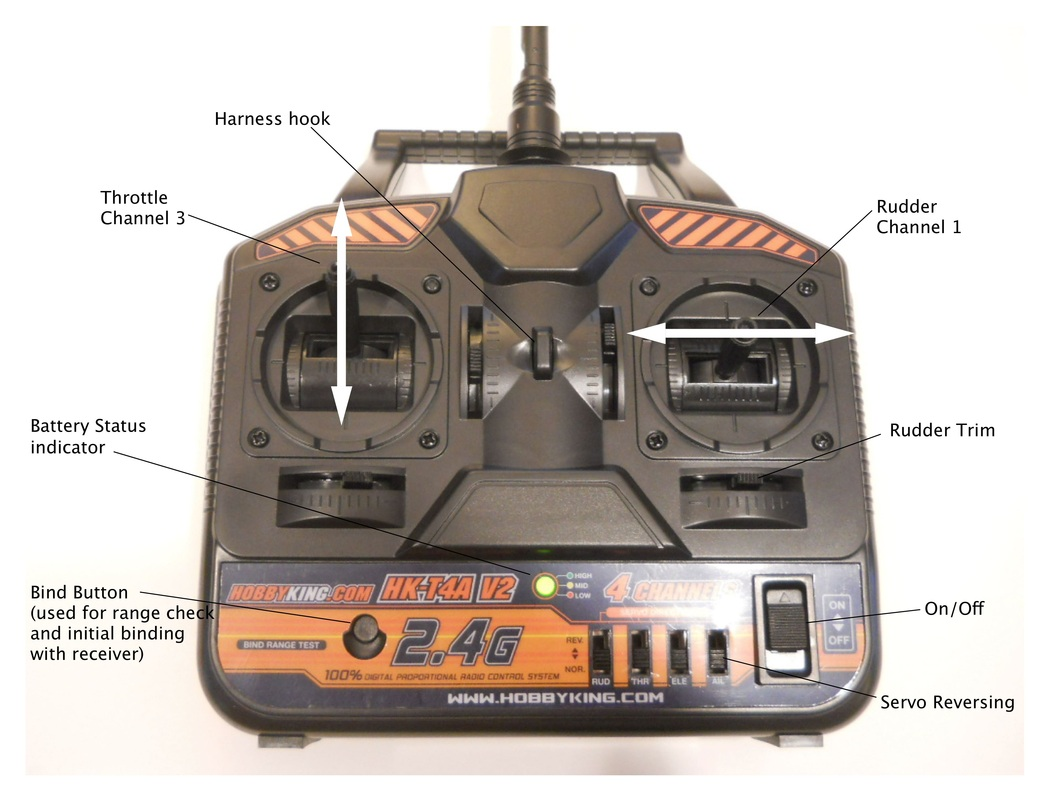
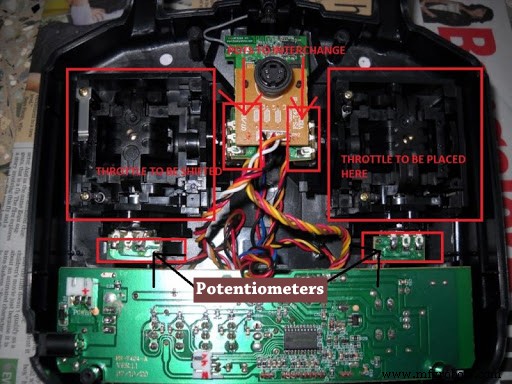
Retirez un joystick et ses deux potentiomètres. Soudez les extrémités de fil respectives aux deux interrupteurs à bascule. Nous avons maintenant un joystick et deux interrupteurs à bascule pour contrôler les 4 canaux. Un interrupteur agit comme interrupteur d'armement du robot et l'autre agit comme interrupteur de contrôle de la lumière UV. L'indicateur LED peut être utilisé comme moniteur de batterie du GCS car il change de couleur en rouge lorsque la batterie est faible.
Maintenant, nous devons faire une alimentation pour l'émetteur et pour l'écran FPV. La tension de cellule d'une batterie 18650 est de 3,7 V. Lorsqu'il est complètement chargé, il devient 4.2V. Pour cela nous connectons 3 cellules en série pour obtenir environ 12V. Dans notre cas, nous avons utilisé des cellules d'une capacité de 1000mAh. Afin d'augmenter la durée de fonctionnement du GCS, nous avons utilisé 9 batteries, 3 ensembles de cellules connectées en série en parallèle pour obtenir une capacité de 3000mAh. Puis connecté le module BMS pour protéger la batterie.
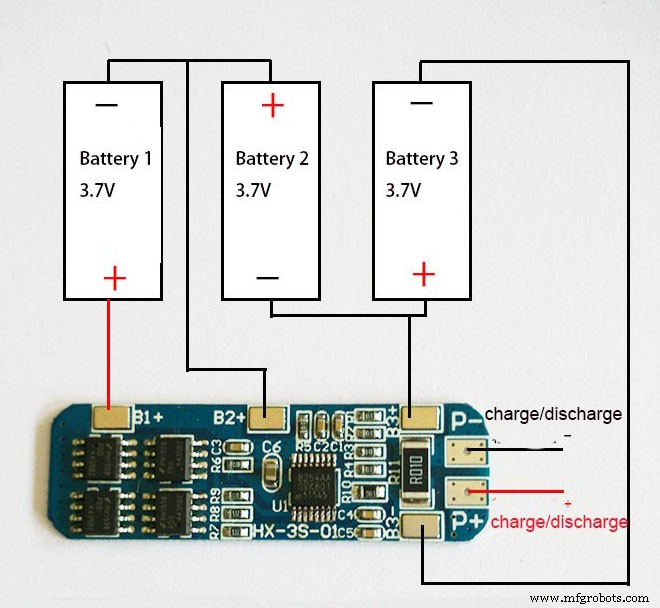
Le P+ et le P- sont connectés à l'entrée d'alimentation de l'émetteur et à l'entrée d'alimentation de l'écran FPV. L'alimentation à découpage 12V (SMPS) est livrée avec un potentiomètre pour ajuster la tension de sortie dans une plage limitée. Réglez-le sur 12,8 et connectez la sortie de tension à P+ et P- du BMS. Cela aidera à charger la batterie lorsque le SMPS est branché.
Vous pouvez concevoir un boîtier pour cela selon vos préférences.
Codage
La première tâche du code est de lire les entrées du canal RC. Puisque nous utilisons un récepteur PWM, j'ai utilisé des interruptions pour lire les valeurs PWM. Pour faciliter les choses, j'ai inclus une bibliothèque PWM pour utiliser des interruptions en définissant la broche connectée de la manière suivante.
PWM ch1(18); // Configuration de la broche 18 pour l'entrée
PWM ch2(19); // Configuration de la broche 19 pour l'entrée
PWM ch3(20); // Configuration de la broche 20 pour l'entrée
PWM ch4(21); // Configurer la broche 21 pour l'entrée Dans la séquence de démarrage, le code vérifie la tension de la batterie et si le commutateur UV est activé. S'il détecte l'un ou l'autre, la procédure de démarrage attendra jusqu'à ce que tout soit corrigé.
//vérifier la tension de la batterie
battery_voltage_monitor();
while(batterylow ==true){
battery_voltage_monitor();
low_battery_notification();
}
//vérifier que le commutateur uv est désactivé
rc_read();
while(uv_pwm> switch_on_pwm){
rc_read();
uv_on_warning_at_startup(); //buzzer
} Lors du fonctionnement des moteurs, la tension de la batterie ne chute de manière critique que pendant ce moment. Pour éviter que l'alarme de basse tension ne se déclenche à chaque fois que nous déplaçons le robot, la partie surveillance de la batterie ne fonctionne que lorsque le robot ne bouge pas.
if (robot_moving ==false){
battery_voltage_monitor(); //surveiller la batterie lorsque le robot ne bouge pas
} Toutes les autres fonctions, y compris le contrôle du pilote du moteur, la génération de tonalités avec buzzer et le contrôle du relais, fonctionnent de la manière habituelle. Vous pouvez suivre un didacticiel général sur les sujets ci-dessus si vous ne les connaissez pas.
Procédures d'exploitation
Procédure de mise sous tension
Contrôleur GCS
1. Allumez l'interrupteur principal.
2. Assurez-vous que l'interrupteur d'armement du robot et l'interrupteur de lumière UV sont éteints. (En position basse).
Robot
1. Allumez l'interrupteur d'alimentation.
2. Attendez la tonalité de départ.
3. Attendez la tonalité d'accord du système.
Contrôler le robot
1. Allumez l'interrupteur d'armement du robot.
2. Déplacez le joystick pour déplacer le robot.
3. Allumez l'interrupteur UV pour allumer les lumières UV. Lorsque l'interrupteur d'armement du robot est en position arrêt, l'interrupteur UV ne fonctionne pas.
Indicateur de niveau de batterie
1. Assurez-vous que la batterie a au moins 4 barres clignotantes pour faire fonctionner le robot.
2. Lorsque la batterie est faible, le buzzer émet un bip et les deux dernières barres de l'indicateur de niveau de batterie clignotent.
Procédure de facturation
1. Éteignez le robot.
2. Éteignez le GCS.
3. Branchez l'onduleur à une prise de courant. (Habituellement, les onduleurs ont un indicateur de niveau de charge intégré)
Considérations générales
1. Utilisation dans des zones surpeuplées
La lumière ultraviolette est nocive pour les yeux et la peau de l'homme. L'exposition à la lumière à courte distance (moins de 3 m) pendant plus de 60 secondes peut endommager les yeux et provoquer une irritation de la peau. Cependant, les rayons ultraviolets ne peuvent pénétrer à travers aucun milieu solide. Regarder la lumière UV à travers un verre transparent n'affecte pas les yeux ou le corps humains.
2. Matériaux et appareils sensibles
Les plastiques souples sont très sensibles à la lumière ultraviolette. Les plastiques souples sont couramment utilisés dans les jouets et les emballages alimentaires. Par conséquent, l'appareil ne peut pas être utilisé dans les magasins de jouets, les supermarchés et là où les articles ci-dessus sont disponibles. Cependant, les lampes UV peuvent être utilisées pour désinfecter les sols des zones susmentionnées.
3. Capacité d'utilisation dans les hôpitaux
Dans les environnements hospitaliers, la lumière UV est utile pour désinfecter les surfaces très tactiles en très peu de temps. Mais l'efficacité de la lumière UV pour les équipements médicaux et les médicaments doit être prise en compte dans ce scénario.
Les équipements médicaux avec boîtiers en plastique sont fabriqués à partir de plastiques durs car ils subissent un traitement par rayonnement pendant le processus de fabrication. De plus, il n'y a pas d'effets prouvés sur l'efficacité de la lumière UV pour les médicaments stockés dans les hôpitaux.
De plus, tous les équipements médicaux en acier inoxydable et les masques N95 peuvent être stérilisés à l'aide du même appareil.
4. Efficacité pour les zones ombragées
La lumière ultraviolette se reflète sur les surfaces de la même manière que les lumières visibles. Par conséquent, les zones qui ne reçoivent pas la lumière UV directe reçoivent la lumière UV réfléchie. Cependant, les zones fortement couvertes ou ombragées ne reçoivent pas de lumière UV efficace. Ces zones ne sont pas non plus désinfectées avec des méthodes à base de liquides de désinfection.
5. Autres considérations
La lumière UV génère de l'ozone lorsque vous travaillez dans des environnements clos pendant de longues périodes. En règle générale, tous les environnements clos sont ventilés pendant 20 minutes après avoir été stérilisés par des lampes UV.
Code
Code pour Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-RobotSchémas
uv-x_Q9R5T59Q32.fzzProcessus de fabrication
- Un robot mobile avec un évitement d'obstacles basé sur la vision
- Robot de webcam Raspberry Pi – Meilleur didacticiel de streaming vidéo
- Robot contrôlé par le Web Raspberry Pi avec vidéo
- Robot de tri de recyclage avec Google Coral
- Obstacles pour éviter le robot avec servomoteur
- Système d'arrosage automatique des plantes avec Arduino
- Hymne national américain avec lumières et sons
- Vidéo :Numérisation en cours de traitement d'un profil tourné—via un robot
- Centre de tournage équipé d'un bras robotisé