


Types de robots industriels et leurs différentes utilisations
Découvrez les nombreux types de robots industriels et leurs capacités uniques. Obtenez une compréhension claire des utilisations et des applications de chaque type de robot aujourd'hui : bras de robot, robots mobiles, drones aériens, robots sous-marins et cobots.
Comment décidez-vous quel type de robot industriel convient le mieux ?
Il existe tellement de types de robots différents sur le marché - comment savoir quel type utiliser ? Comme pour de nombreux problèmes de conception et d'ingénierie, « la forme suit la fonction ». C'est-à-dire que le type de robot nécessaire dépend de sa fonction prévue. Le robot sera-t-il fixé au sol ou à une autre surface, ou doit-il être mobile ? Combien d'unités par heure le robot doit-il être capable de traiter ? Quel est le poids maximum que le robot doit soulever ? Si le robot est fixé à un endroit, quelle est la taille de l'enveloppe de travail ? L'enveloppe de travail est-elle rectangulaire ou circulaire ? Répondre à ces questions affinera rapidement vos choix et vous permettra de sélectionner le type de robot industriel idéal pour vos besoins.
Dans cet article, nous examinons différents types de robots, leurs forces et leurs faiblesses, et comment déterminer à quoi les utiliser.
Contenu de cet article
- Robots stationnaires (bras robotisés)
- Robots mobiles autonomes
- Robots volants (drones aériens)
- Robots sous-marins
- Comment trouver le type de robot idéal pour votre organisation
Robots stationnaires (bras robotisés)
Il existe sept principaux types de robots stationnaires disponibles sur le marché. Par stationnaire, nous entendons des robots qui sont boulonnés au sol, au plafond ou à une autre surface - ils ne sont pas mobiles. En règle générale, les robots fixes sont des bras robotiques conçus pour des tâches telles que la cueillette et le placement, le tri, l'assemblage, le soudage et la finition.
Nous examinons ici les différents types de bras robotiques, leurs caractéristiques et leurs utilisations.
- Bras robotiques articulés
- Robots cartésiens ou rectangulaires
- Robots SCARA
- Robots polaires ou sphériques
- Robots delta ou parallèles
- Robots portiques
- Cylindrique
- Robots/Cobots collaboratifs
Bras de robot articulés
Avantages : Mouvement le plus flexible de tous les types de bras de robot. Peut être assez puissant, capable de soulever des objets lourds.
Inconvénients : Peut-être besoin d'être clôturé. Plus lent que certains des autres bras de robot. Plus cher que les autres bras de robot. Nécessite des systèmes de contrôle plus sophistiqués.
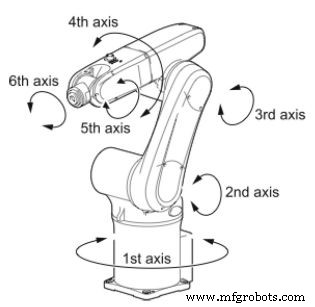
En comparaison avec d'autres types de bras de robot, le mouvement d'un bras de robot articulé ressemble le plus à un bras humain. Un bras articulé typique a six axes, ou articulations. Il peut en avoir moins ou plus, selon l'application et le fabricant. Plus un robot a d'articulations, plus son mouvement devient fluide et moins « robot ». Cette flexibilité de mouvement est décrite par Degrés de liberté.
Fait intéressant : Les concepteurs de mains artificielles considèrent que la main humaine a 27 degrés de liberté. Un bras humain a 7 degrés de liberté, pour un total combiné entre le bras et la main humains de 34 degrés de liberté.
Reproduire toutes les manières subtiles dont le bras et la main humains peuvent se déplacer serait trop coûteux et complexe pour un robot industriel. Il est généralement admis que 6 degrés de liberté dans un bras de robot industriel lui suffisent pour effectuer presque toutes les tâches nécessaires.
Le robot ne pourra pas jouer du piano, mais il n'en a pas besoin !
Selon l'application, un bras de robot peut être équipé d'une pince, l'équivalent robotique d'une main. Habituellement, les pinces robotisées sont beaucoup plus simples que la main humaine. Parfois, ils peuvent être aussi simples qu'une ventouse ou un électro-aimant. Ou, peut-être qu'une pince souple à trois doigts pourrait être utilisée pour ramasser des objets délicats, comme des produits frais ou un œuf. Il existe de nombreux types de préhenseurs différents, et aucun préhenseur robotisé n'a encore été trouvé capable de gérer toutes les applications.
Alternativement, l'outillage d'extrémité de bras (EoAT) comme on l'appelle, peut être une sorte d'outil, peut-être un outil rotatif qui contient un foret, ou un autre type de foret, pour l'ébavurage, le meulage ou le fraisage. Il existe de nombreuses possibilités, y compris l'EoAT spécialisé pour le soudage, la peinture, le ponçage, la découpe laser et bien d'autres.
Les robots articulés sont très flexibles car toutes leurs articulations peuvent pivoter, contrairement aux articulations linéaires ou translationnelles, qui ne peuvent se déplacer qu'en ligne droite.
Les robots articulés sont utilisés dans des applications telles que le pick and place, le soudage à l'arc, le soudage par points, l'emballage, l'entretien des machines et la manutention de matériaux. La capacité de produire des arcs (ou des motifs similaires) dans des endroits difficiles d'accès fait des robots articulés un bon candidat pour l'industrie automobile et d'autres fabrications qui nécessitent cette capacité.
Historiquement, les robots à bras articulés grands et puissants capables de ramasser des objets pesant une tonne ou plus n'étaient pas équipés de capteurs leur permettant de prendre conscience de leur environnement. Si une personne devait gêner un tel robot, elle pourrait être gravement blessée, voire tuée.
En conséquence, ces bras robotiques doivent être séparés dans un espace qui leur est propre. Seul le personnel qualifié qui comprend parfaitement le fonctionnement du robot est autorisé à pénétrer dans l'espace clos ou clôturé dans lequel ces robots opèrent.
Cependant, si un bras de robot articulé est équipé de capteurs et d'un logiciel de contrôle appropriés, il peut fonctionner en toute sécurité à proximité de personnes. Par exemple, en utilisant la vision par ordinateur avec une caméra ou peut-être un capteur LiDAR, si un tel robot détecte que quelque chose gêne son mouvement, ou même qu'une personne ou un objet s'approche et ne gêne pas encore, le robot peut ralentir ou s'arrêter. D'autres capteurs peuvent détecter une collision - si le bras heurte quelque chose, il s'arrêtera et/ou changera de cap. Habituellement, les bras articulés qui peuvent fonctionner en toute sécurité aux côtés de personnes sont conçus pour être limités dans leur vitesse et leur force.
Robots cartésiens ou rectangulaires
Avantages : Système de contrôle simple. Selon le modèle, peut soulever des objets très lourds. Exact. Rigide dans les trois axes. Moins cher que les bras articulés.
Inconvénients : Ne peut pas faire de mouvements de rotation.
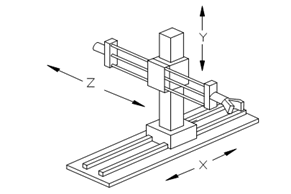
Ces robots utilisent le système de coordonnées cartésiennes (X, Y et Z) pour les mouvements linéaires le long des trois axes (avant et arrière, haut et bas et côte à côte). Les trois articulations sont en translation, ce qui signifie que le mouvement de l'articulation est limité à une ligne droite. C'est pourquoi de tels robots sont également appelés robots « linéaires ».
Les robots cartésiens peuvent être utilisés pour le pick-and-place, la manutention, l'automatisation de l'emballage, le stockage et la récupération, la découpe et le perçage, et bien d'autres applications.
Ils sont rigides dans les trois dimensions, ce qui les rend très précis et reproductibles. Ils sont plus simples que les bras robotiques articulés, avec un contrôle logiciel plus simple et peuvent être moins coûteux, selon l'application.
Robots portiques - Un type de robot cartésien
Avantages : Selon le modèle, peut soulever des objets très lourds. Peut être très grand, s'étendant sur toute la longueur de l'installation, si vous le souhaitez. Peut être très rentable pour les bonnes applications.
Inconvénients : Impossible de faire un mouvement de rotation.

Les robots cartésiens ou linéaires peuvent être configurés comme des robots portiques. Les robots portiques se déplacent le long d'une voie aérienne. Selon leur conception, les robots portiques peuvent manipuler des charges très lourdes et les déplacer rapidement et précisément. Ils peuvent également être très grands, si nécessaire, couvrant toute la surface au sol d'une installation. Des robots portiques plus petits peuvent être utiles pour le pick-and-place et d'autres opérations impliquant une grande précision et une bonne rigidité.
Parce que l'aspect contrôle de mouvement du robot linéaire est relativement simple, il est souvent moins coûteux que d'autres types de robots et peut être une solution très rentable pour de nombreuses tâches d'automatisation.
L'enveloppe de travail d'un robot cartésien est rectangulaire. L'ajout du mouvement vertical signifie que l'enveloppe de travail a la forme d'une boîte.
Robots SCARA
Avantages : Excellent pour de nombreuses applications d'assemblage. Rapide et précis. Économique pour les opérations d'assemblage.
Inconvénients : Pas aussi flexible que les bras articulés. Pas aussi précis que les armes cartésiennes. Pas aussi rapide que les bras robotiques Delta.
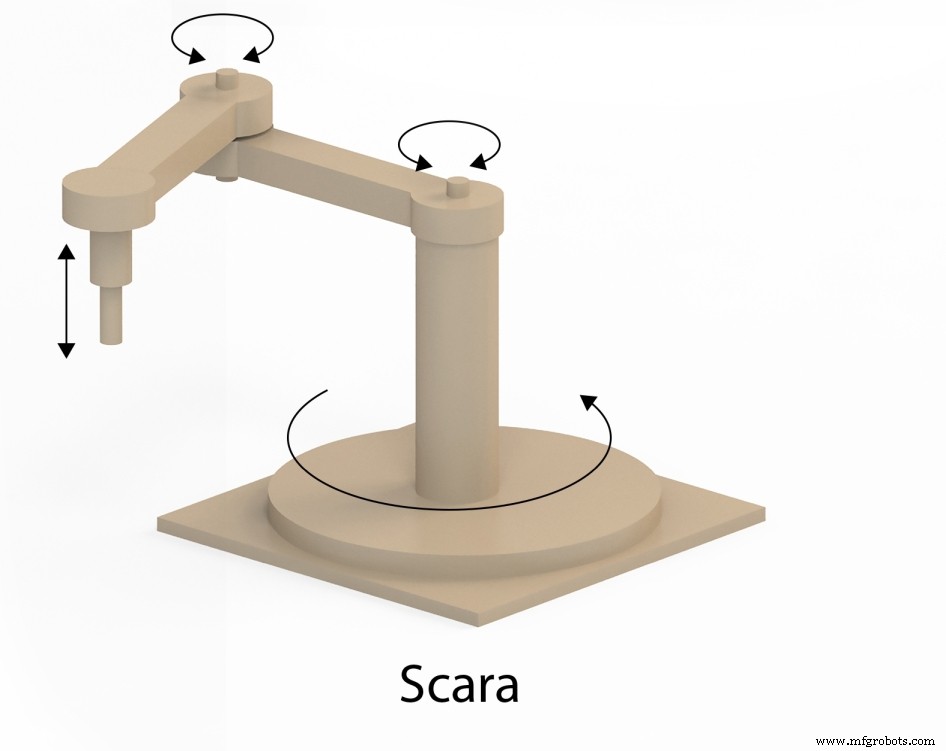
Les robots SCARA (Selective Compliance Assembly Robot Arm) sont similaires aux robots cartésiens en ce sens qu'ils se déplacent selon 3 articulations ou axes. Cependant, contrairement aux robots cartésiens, deux des articulations des robots SCARA sont rotatives. Ils sont donc capables de mouvements plus complexes que les robots cartésiens. Ils sont généralement plus rapides et ont plus de souplesse de mouvement mais sont moins précis que les robots cartésiens.
Fait intéressant : L'utilisation généralisée des robots SCARA a révolutionné la petite industrie électronique. En raison de leur faible encombrement, de leur simplicité et de leurs caractéristiques de conception, ils sont particulièrement bien adaptés à ce domaine d'application et se sont avérés très rentables.
Comme l'indique le mot « assemblage » dans son nom, le bras robotisé SCARA a été inventé pour les applications d'assemblage. Le robot SCARA a été créé en 1981 par Hiroshi Makino à l'université de Yamanashi au Japon. Le « conformité » dans le nom fait référence à une certaine quantité de « donner ». C'est-à-dire que si vous poussez un robot SCARA dans le plan horizontal, il cédera un peu - il bougera, il n'est pas totalement rigide. Cependant, dans le plan vertical, un robot SCARA est assez rigide, et il ne « cédera » pas si vous le poussez dans cette direction. Par conséquent, il a une conformité « sélective ». Il est conforme dans le plan horizontal, et non dans le plan vertical.
La conformité sélective est très utile dans les opérations d'assemblage dans lesquelles une pièce doit être insérée dans un circuit imprimé, par exemple. Ce type d'assemblage nécessite souvent l'insertion d'une pièce dans un trou. Le centrage de la pièce dans le trou nécessite souvent un peu de « conformité » pour trouver le point central - un peu de remuement, ou un peu de « céder ». Ensuite, la force d'insertion, se déplaçant vers le bas, doit être ferme et rigide.
Les robots SCARA sont moins rigides que les robots cartésiens et sont également limités au poids qu'ils peuvent soulever, en comparaison avec le robot cartésien qui peut soulever des objets assez lourds. Les robots SCARA ont un faible encombrement et sont généralement utilisés pour des applications dans lesquelles les distances à déplacer sont relativement faibles. Ils ont moins de degrés de liberté que les bras articulés. D'autre part, ils ont un haut degré de précision et sont assez reproductibles. Et ils sont moins chers qu'un bras articulé.
L'enveloppe de travail d'un robot SCARA est cylindrique, ce qui est également un facteur à prendre en compte lors de l'examen de l'application. Les robots SCARA sont généralement plus rapides que les bras articulés, mais pas aussi rapides que les robots Delta.
Robots polaires ou sphériques
Avantages : Système de contrôle plus simple que le bras articulé. Peut avoir une longue portée. Très bon pour de nombreuses applications de soudage. Peut être plus rapide que le bras articulé.
Inconvénients : Pas aussi flexible que les bras de robot articulés. Technologie plus ancienne. A souvent besoin d'un encombrement assez important. Pas aussi rapide que les bras Delta.
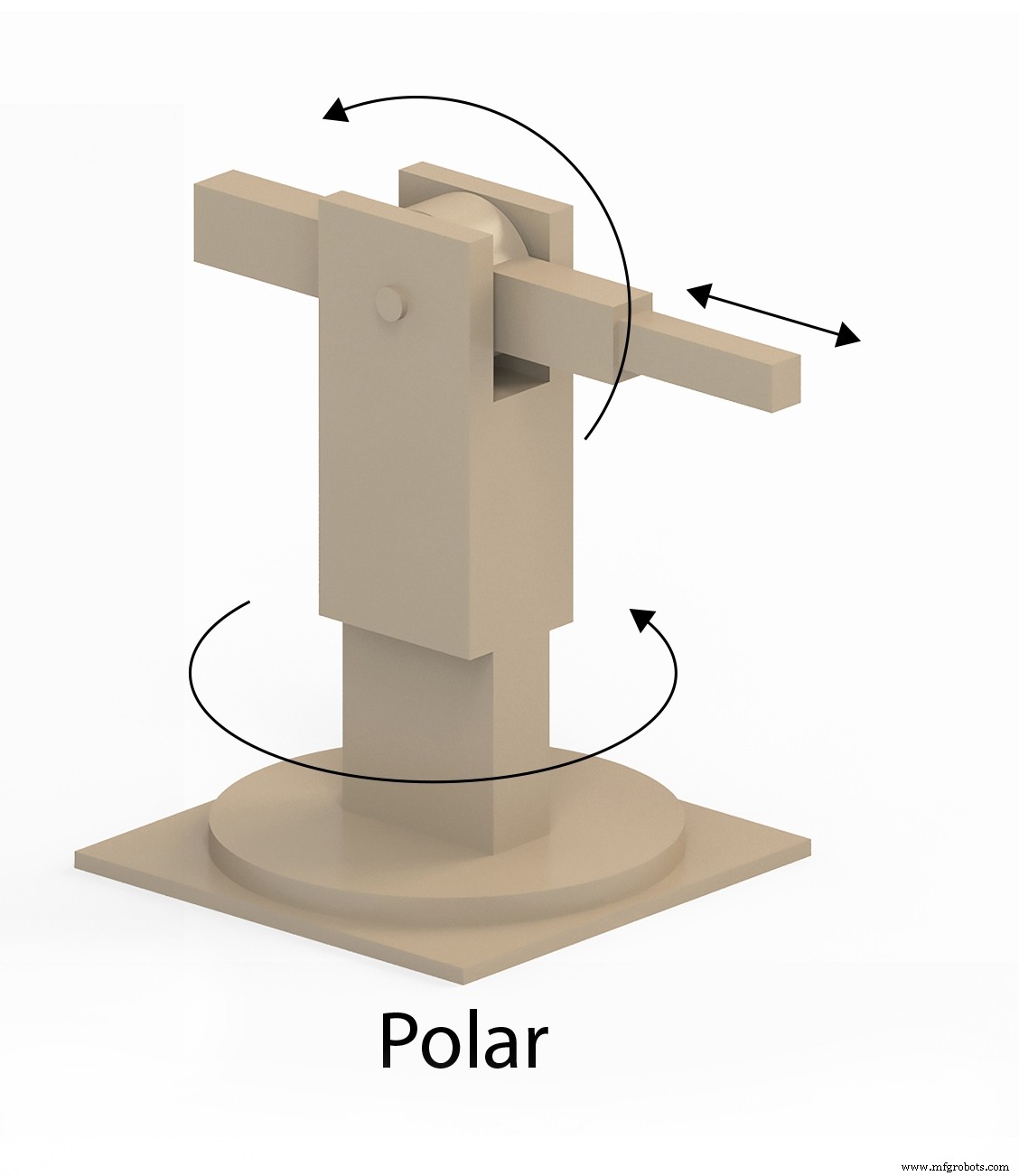
Les robots polaires (parfois appelés robots sphériques) présentent une combinaison de deux articulations rotatives et d'une articulation linéaire. Leur conception crée un espace de travail de forme sphérique.
Fait intéressant : Le premier robot industriel (créé dans les années 1950), appelé « Unimate », était un robot sphérique.
Les robots Polar peuvent être utilisés pour le moulage par injection, la peinture, le soudage à l'arc et le soudage par points. Ils peuvent avoir une longue portée lorsqu'ils sont équipés d'un bras linéaire de taille appropriée.
Les robots polaires sont une technologie plus ancienne et peuvent être remplacés par des robots à bras articulés (qui ont également une enveloppe de travail sphérique), bien que dans certaines applications, le robot polaire puisse encore être plus rentable que ses alternatives.
Robots Delta
Avantages : Conception la plus rapide des bras de robot pour les opérations de prélèvement et de placement. Poids léger. Exact.
Inconvénients : Limité aux objets relativement petits et légers. Ne convient pas pour travailler sur des objets dans un plan vertical. Portée limitée.
Robots Delta (également appelés robots parallèles) ont trois bras robotiques en forme de parallélogrammes. Habituellement, le robot delta est situé au-dessus des pièces, attaché à un tréteau suspendu. Parce que tous les moteurs sont sur la base, les articulations et les bras du robot sont très légers par rapport aux autres robots. Le robot Delta a une enveloppe de travail en forme de dôme à l'envers.
Fait intéressant : Le robot Delta a été conçu à l'origine pour permettre à un chocolatier de ramasser des morceaux de chocolat et de les placer dans une boîte.

La conception du robot Delta permet un fonctionnement à grande vitesse et précis. Les robots Delta sont principalement utilisés dans les applications de prélèvement et de placement. Les applications supplémentaires incluent la distribution d'adhésif, le soudage et l'assemblage. Les robots Delta ne peuvent pas transporter de charges utiles lourdes, ce qui limite les types d'outillage en bout de bras (EoAT) et les tâches qu'ils peuvent gérer.
Les conceptions hybrides des robots Delta placent parfois des articulations rotatives à l'extrémité des bras pour augmenter la flexibilité de son mouvement.
Robots cylindriques
Avantages : Rigide. Exact. Parfait dans les applications qui nécessitent une géométrie circulaire.
Inconvénients : Technologie plus ancienne. Flexibilité de mouvement limitée.
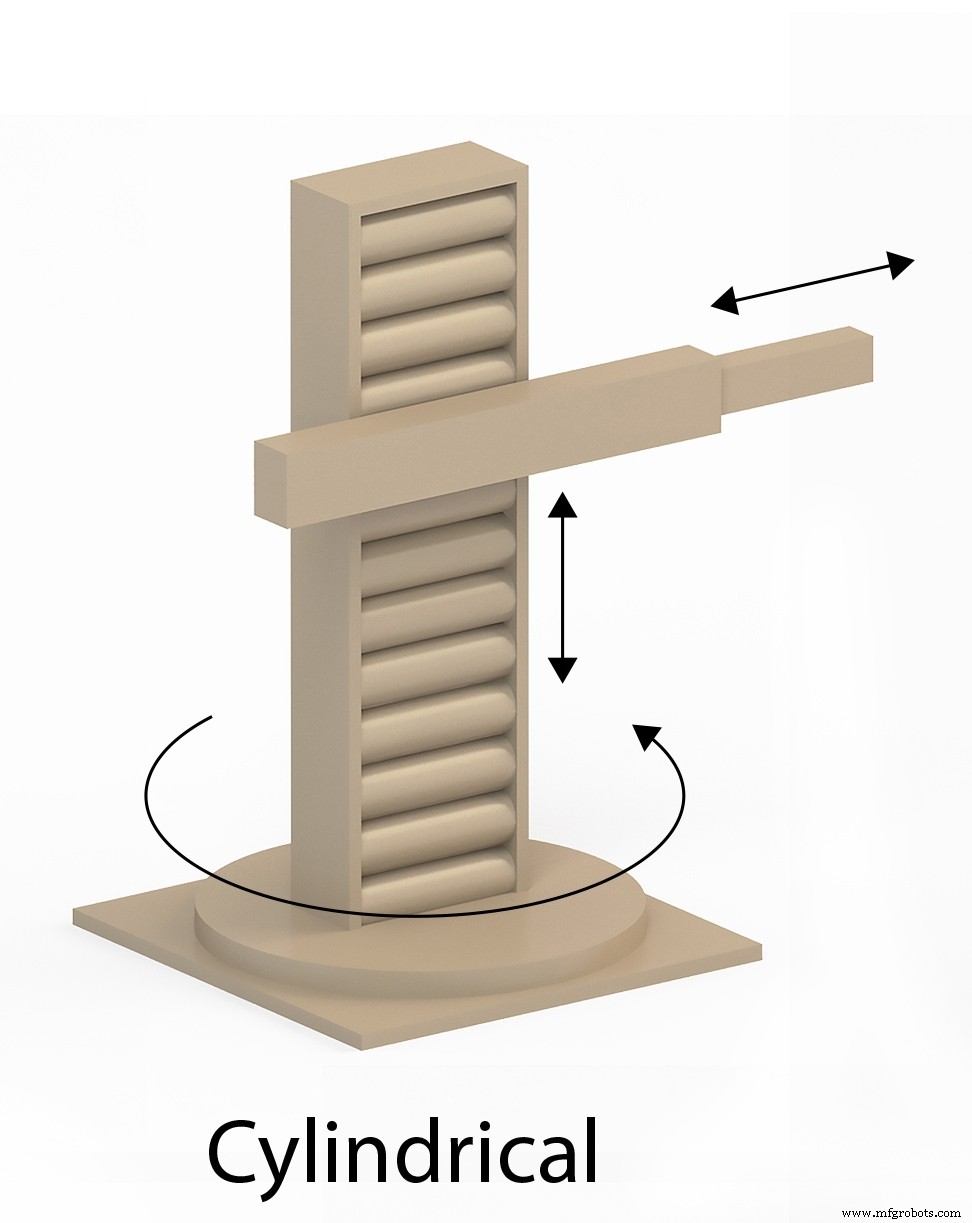
Robots cylindriques avoir au moins un joint tournant à la base et deux joints linéaires. Cette conception conduit à un espace de travail de forme cylindrique.
Les robots cylindriques sont généralement utilisés dans des espaces de travail restreints et ils conviennent parfaitement aux objets qui doivent avoir une symétrie circulaire (par exemple des fils, des tuyaux). Les applications de meulage, d'assemblage et de soudage par points utilisent des robots cylindriques.
Robots collaboratifs (cobots)
Avantages : Travailler en toute sécurité aux côtés des gens. Les interfaces modernes permettent « d'enseigner » au bras du robot ce qu'il doit faire sans écrire de code.
Inconvénients : Pas toujours le type de bras robotique le plus rapide. Limité en force et en vitesse.
Les robots collaboratifs (cobots) permettent une interaction homme-robot dans un environnement de travail sûr, sans avoir besoin de clôtures ou d'autres mesures de sécurité prises dans les applications de robots industriels traditionnels. Cependant, les mesures de sécurité entraînent une diminution de la vitesse de fonctionnement.

En plus de pouvoir opérer en toute sécurité aux côtés des humains, l'une des caractéristiques qui rendent les cobots plus collaboratifs est la capacité d'un opérateur à enseigner au bras du robot les mouvements à effectuer sans avoir à écrire de code de programmation. L'opérateur saisit le bras du robot et le déplace physiquement dans la direction que doit suivre le robot. Le bras du robot peut alors reproduire le mouvement démontré.
Un cobot standard n'est généralement pas conçu pour manipuler des objets très lourds. Cela crée une limitation de la gamme de produits qu'il peut gérer.
Les robots collaboratifs ont un large éventail d'applications telles que l'entretien des machines, le prélèvement et le placement, l'assemblage, le soudage à l'arc, mais ne sont généralement pas adaptés aux applications lourdes ou aux tâches à très grande vitesse.
Robots mobiles autonomes

Les AMR ou Robots Mobiles Autonomes représentent un segment en pleine croissance du marché des robots industriels. Ils se présentent sous de nombreuses formes et tailles, optimisées pour les tâches pour lesquelles ils sont conçus.
Chariots à roues
Les AMR sous forme de chariots ou de véhicules à roues sont généralement utilisés pour le transport de marchandises dans une usine ou un entrepôt. Ils sont équipés de capteurs, d'une puissance de calcul embarquée et de moteurs électriques qui leur permettent de se déplacer dans une installation et d'en créer une carte interne. Cela se fait souvent avec une personne qui suit l'AMR partout, la guidant par télécommande.
Une fois qu'une carte interne a été créée, l'AMR peut alors être informé des destinations vers lesquelles il doit se rendre. Une caractéristique clé des AMR est qu'ils peuvent voyager de manière indépendante (« autonome ») d'un endroit à un autre, en évitant les obstacles en cours de route. Si une personne, un chariot élévateur ou un autre objet bloque leur chemin, ils peuvent faire un écart pour éviter l'obstacle ou même planifier un tout nouvel itinéraire vers leur destination.
Les capacités autonomes des AMR les rendent très flexibles par rapport à un système de convoyage.
Les AMR sous forme de chariots à roues peuvent être utilisés individuellement pour transporter des marchandises, et ils peuvent également être utilisés dans le cadre d'un essaim ou d'une flotte de robots. Des flottes d'AMR sont utilisées par Amazon, par exemple. Amazon utilise ce qu'on appelle une configuration « goods to person », dans laquelle chaque robot récupère une étagère entière de produits et l'apporte à une personne à un poste de préparation de commandes. La personne prend ensuite le ou les produits sur l'étagère et les place dans un conteneur pour l'exécution des commandes de commerce électronique.
Récemment, les progrès de la vision par ordinateur, de l'intelligence artificielle et de la technologie des pinces ont permis de remplacer la personne au poste de prélèvement par un bras robotique articulé. Dans ce cas, le chariot à roues AMR amène la marchandise au bras du robot, pour une collaboration de robot à robot.
Véhicules à guidage automatique (AGV)
Les AGV se présentent généralement sous la forme d'un véhicule à roues et constituent une technologie plus ancienne que les AMR. Ils ont moins d'intelligence embarquée et par conséquent ne sont pas aussi autonomes que les AMR. Les AGV n'ont pas la capacité de faire une carte d'une installation. Au lieu de cela, ils s'appuient sur des chemins tracés pour eux. Les chemins sont définis par des fils placés dans le sol, ou du ruban spécial ou d'autres types de guides. Si un AGV rencontre des obstacles sur son chemin, il ne peut que s'arrêter et appeler à l'aide.
Cependant, les distinctions entre AGV et AMR deviennent de plus en plus floues. Les AGV reçoivent plus de puissance de calcul embarquée, et certains ont désormais la capacité de contourner les obstacles sur leur chemin.
AMR avec Robot Arms
Un bras robotique peut être monté au-dessus d'un chariot à roues AMR. Cela augmente la flexibilité du robot et la variété des tâches qu'il peut effectuer. Une application consiste à utiliser un tel robot pour entretenir toute une rangée de machines-outils. Le robot peut décharger une pièce finie et charger une nouvelle pièce brute dans une machine, puis se déplacer vers le bas de la rangée et répéter les opérations pour une série de machines.
Robots à pattes
Des millions de personnes ont vu la vidéo YouTube de robots danseurs réalisée par Boston Dynamics et ont donc vu des robots à deux et quatre pattes. Une utilisation industrielle des robots à pattes envisage de les déployer pour la livraison de colis. Un autre cas d'utilisation concerne les opérations de recherche et de sauvetage.
L'utilisation de jambes au lieu de roues présente certains avantages. Les jambes permettent au robot de se déplacer sur certains types de terrain que les chariots à roues trouveraient difficiles ou impossibles. Les jambes permettent de monter les escaliers et d'entrer et de sortir d'un véhicule plus facilement qu'un chariot à roues.
AMR sphériques
Les robots mobiles autonomes sous la forme d'une sphère sont disponibles dans le commerce et présentent des avantages particuliers par rapport aux autres facteurs de forme. Les composants du système AMR sphérique sont scellés à l'intérieur d'une coque durable. Cela les rend capables de fonctionner dans des environnements difficiles. Ils peuvent également flotter et voyager sur l'eau. Les AMR sphériques peuvent être amphibies, se déplaçant à la fois sur l'eau et sur terre.
Le système de propulsion d'un AMR sphérique est le plus souvent basé sur le déplacement du centre de gravité.
Les applications industrielles des AMR sphériques sont principalement dans la surveillance et l'inspection à distance. Equipés de caméras et de communication, ils peuvent retransmettre la vidéo à l'opérateur distant. Pour les environnements hostiles pouvant contenir des gaz toxiques ou d'autres conditions dangereuses, un AMR sphérique peut être idéal.
Robots Volants (Drones Aériens)
Les véhicules aériens sans pilote (UAV) ou les drones sont de plus en plus utilisés à diverses fins industrielles. Une application consiste à utiliser des drones dans les entrepôts pour faire l'inventaire. Le drone peut voler dans les allées de l'entrepôt et utiliser la vision par ordinateur pour compter le nombre d'articles dans des boîtes sur les étagères.

Selon sa conception, un drone industriel peut être une sorte de robot mobile autonome (AMR), car certains modèles peuvent détecter automatiquement les obstacles et les éviter, et naviguer de manière autonome jusqu'à leur destination. Certains drones industriels peuvent se voir confier une « mission », qui peut consister à survoler une exploitation minière à ciel ouvert ou un projet d'infrastructure. Le drone effectue sa mission de manière autonome et peut enregistrer une vidéo du projet, ou effectuer certaines mesures et les enregistrer. Ces drones peuvent être utilisés pour surveiller l'avancement des projets de construction.
Amazon et d'autres sociétés font déjà un usage limité des drones pour la livraison de biens durables et d'épicerie.
Robots sous-marins

Il existe une grande variété de robots conçus pour être utilisés sous l'eau. Certains robots sous-marins sont conçus pour être autonomes (Autonomous Underwater Vehicles - UAV), et certains sont conçus pour être contrôlés à distance, soit sans fil, soit avec une attache filaire. Certains robots sous-marins utilisent des hélices comme système de propulsion, similaires aux sous-marins. D'autre part, beaucoup de ces robots imitent l'action des créatures vivantes pour leur propulsion. Certains imitent l'action des dauphins, d'autres des serpents et d'autres encore se déplacent comme des poissons. Imiter la nature de cette manière est appelé « biomimétisme » car l'action du robot imite les créatures biologiques.
Les robots sous-marins peuvent être utilisés pour l'inspection des plates-formes pétrolières offshore, des pipelines et pour la recherche scientifique. D'autres applications impliquent l'utilisation de robots sous-marins pour inspecter le fond des ponts, inspecter les prises d'eau des barrages hydroélectriques et inspecter les récifs coralliens.
Des robots sous-marins sont utilisés par les services de police pour prendre des enregistrements vidéo du fond des plans d'eau à la recherche de preuves. L'armée s'intéresse également aux robots sous-marins. Un système de sonar pourrait-il faire la différence entre un « dauphin » robotique et un vrai ?
Les avantages des robots sous-marins sont nombreux. De tels robots signifient qu'il n'est pas nécessaire d'encourir les risques et les dépenses des plongeurs humains. Les robots peuvent rester immergés plus longtemps que les humains. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
How to source the ideal robot type for your organization
HowToRobot est une plate-forme mondiale aidant les entreprises à réussir avec l'automatisation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process. Cliquez ici pour organiser une consultation avec un conseiller expert.
Robot industriel
- Différents types d'échelles industrielles et leurs applications
- Types de grues EOT et leurs utilisations
- Différentes nuances de bronze d'aluminium et leurs utilisations
- 5 alliages métalliques industriels importants et leurs utilisations
- Différents types de poinçons et leurs utilisations
- Quels sont les différents types de poinçons et leurs utilisations
- Comprendre les différents types d'outils de poinçonnage et leurs principales utilisations
- Différents types de métaux non ferreux et leurs utilisations
- Différents types de moulage sous pression et leurs applications