


Comment un robot atteint-il une autonomie totale ?
Lorsque la plupart des gens pensent à des robots entièrement autonomes, ils s'inquiètent des scénarios d'IA fantaisistes qui ont peu de fondement dans les faits réels - et les mystères - que nous connaissons sur la conscience. Tout en se concentrant sur cela, il devient plus difficile pour les gens de voir la valeur pratique des robots qui peuvent fonctionner de manière indépendante et sans surveillance substantielle lorsqu'il existe une variété d'emplois, de processus et d'industries qui ONT BESOIN d'une aide beaucoup plus importante pour améliorer à la fois leur rentabilité et leur impact positif.
Dans le même temps, l'autonomie du robot a été victime de certaines définitions - et attentes - qui ne sont pas nécessairement utiles pour comprendre ce dont un robot a besoin pour devenir autonome et où l'autonomie peut être atteinte plus rapidement.
Pour permettre à un robot d'atteindre sa pleine autonomie, plusieurs critères doivent être remplis :
- Le robot doit être capable d'obtenir par lui-même des informations significatives sur son environnement
- Le robot doit être capable de traiter ces informations de manière structurée et utilisable
- Le robot doit être capable de planifier ses actions en réponse à ces informations
- Le robot doit être capable d'exécuter le plan qu'il génère en temps opportun
Dans toutes ces circonstances, il est important de comprendre quelques autres choses en termes de structure de ces paramètres :
- Un robot doit avoir un objectif. Alors que nous associons traditionnellement l'autonomie humaine à la capacité de définir ses propres objectifs, il n'y a aucun paramètre attendu au sein duquel les robots d'aujourd'hui prendront conscience d'eux-mêmes.
- L'autonomie d'un robot doit être spécifique au cas d'utilisation. Une voiture entièrement autonome peut fonctionner à différents niveaux – certains sur autoroute, d'autres sur tous les terrains. Selon les circonstances, les deux peuvent exercer le même degré d'autonomie.
- La conception fonctionne mieux lorsqu'elle minimise le besoin d'intervention humaine ; alors que certaines applications de « cobot » autonomes peuvent aider à optimiser la productivité ou la réalisation d'un objectif souhaité, dans la plupart des cas, l'autonomie ne serait pas un qualificatif adéquat lorsqu'un engagement humain direct est requis.
Alors, comment passe-t-on du point A au point B ? Comment un robot traditionnel « programmable » devient-il totalement autonome ? Eh bien, c'est là que le plaisir commence !
Obtenir des informations sur l'environnement
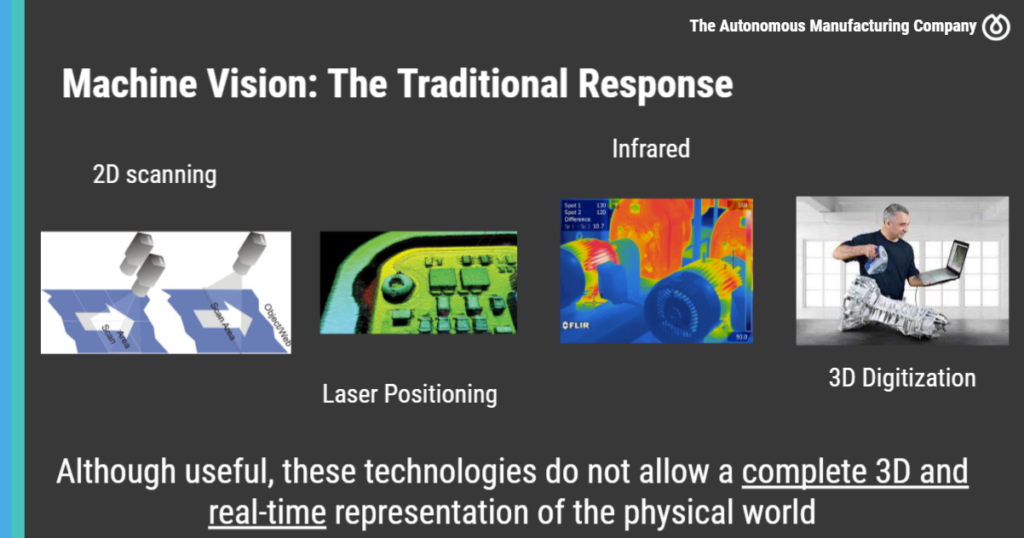
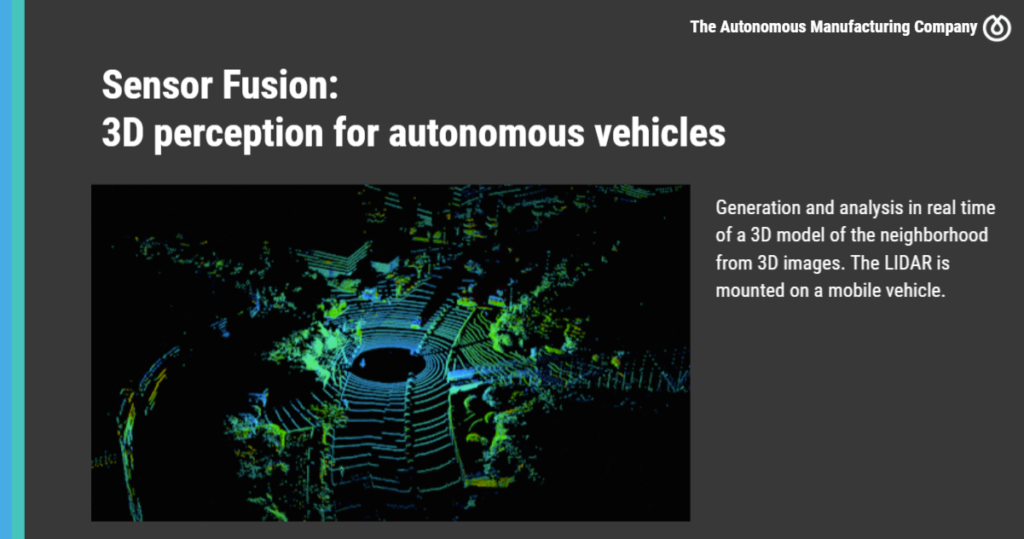
Il existe un large éventail de solutions pour informer un robot de ce qui se passe autour de lui. Lidar, radar, sonar, capteurs tactiles, toutes sortes de systèmes de vision, un nombre infini de mécanismes de communication différents allant de capteurs extra-robotiques, de caméras ou de systèmes d'information locaux qui peuvent être de nature audio ou vidéo. Tous ces éléments sont simplement une tentative de donner aux robots les mêmes types de sens qu'un humain, et sont depuis longtemps la norme dans des domaines tels que le contrôle automatique des machines pour les processus d'automatisation hautement spécialisés.
Il est important de considérer que la détection n'est pas la seule limitation ici. Par exemple, dans les systèmes industriels qui sont désormais compatibles IoT (Internet des objets) - ou au moins en réseau - différents contrôleurs de processus et logiques programmables peuvent être connectés ensemble dans différentes chaînes utilisées pour exécuter différents processus. Ce qui peut être fait à partir de là, cependant, c'est d'incorporer ces informations dans des processus robotiques pour comprendre la position, l'orientation et la manipulation nécessaire pour avoir lieu sur un objet.
En dehors des circonstances industrielles, les mêmes modèles peuvent être appliqués, mais ils doivent être contextualisés avec les bons types d'informations connectées. Par exemple, si quelqu'un cherche à créer un robot pour les soins médicaux ou les soins aux personnes âgées, les capacités de détection externes peuvent être utiles pour gérer la santé d'un patient, mais sans une sécurité et une anonymisation appropriées, elles pourraient également présenter des risques pour la vie privée ou l'agence en ce qui concerne qui est soigné et par quel robot dans quelles circonstances.
De la même manière, la 5G est considérée comme une opportunité majeure de coordonner les futures voitures autonomes et de générer des gains d'efficacité en automatisant tous les aspects de la conduite et du transport, tout en optimisant des éléments tels que les conditions routières, les goulots d'étranglement, les routes bloquées, etc. S'il s'agit d'applications très puissantes, la manière dont les informations sont traduites vers un robot doit être gérée avec délicatesse. Avec un grand pouvoir vient une grande responsabilité, après tout.
Traiter les informations de manière structurée
Comment est-on censé digérer l'information de manière utilisable ? Quand nous pensons à la façon dont nous le faisons en tant qu'êtres humains, c'est une seconde nature ou souvent instinctif en termes de façon dont nous prenons des décisions. Ce que nous ne réalisons souvent pas, c'est que tant de nos décisions sont basées sur des traits acquis de manière évolutive, sociale ou comportementale - ainsi que sur des caractéristiques de nos personnalités - qui font que notre façon de fonctionner semble parfois déterministe, mais pas sans surprises ni amusement !
En ce qui concerne les robots, en revanche, nous n'aimons pas les surprises ! De bonnes surprises, bien sûr - des choses comme découvrir qu'un robot est meilleur ou plus efficace que ce que nous pourrions espérer sont formidables, mais si cela signifie que nous devons anticiper toutes les fonctions possibles d'un robot autonome - que ce soit dans la livraison, le transport, la prestation de soins , la manutention, l'inspection, la maintenance prédictive, les processus industriels ou tout simplement un chien robot qui fait des backflips - la gestion de nos attentes est bien plus préférable qu'un "échec de fonctionnement".
Pour cette raison, il est important de réaliser que la création d'un robot autonome signifiera rarement que les choses fonctionnent hors de la boîte. Alors que certaines entreprises et universitaires travaillent sur des moyens de simplifier les modèles fondamentaux de détection et de traitement des robots autonomes, ces modèles doivent finalement contribuer à des modèles de processus qui simplifient la capacité d'un robot à utiliser les informations de manière exploitable.
Planifier des actions à partir des données
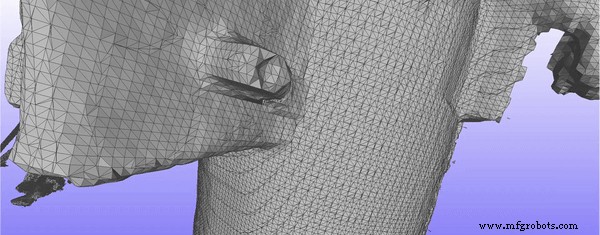
Les données générées par les mécanismes de détection d'un robot peuvent être digérées de diverses manières. En fin de compte, pour les données visuelles 3D, le moyen le plus simple est de décomposer et de réintégrer les données d'une forme dans un objet entier. Il s'agit d'un processus parallèle qui nécessite une accumulation de nombreuses petites opérations - alors que le cerveau humain fonctionne de cette manière de manière très flexible, générer des modèles fiables pour ce type de traitement nécessite une répétition et une validation importantes.
L'aspect le plus utile de ce processus consiste à injecter des données dans un modèle de processus global pour tout ce que le robot doit faire. Soulever et transporter quelque chose ? Déposer le courrier dans une boîte aux lettres ? Peindre ou souder quelque chose ensemble ? Chacune de ces actions nécessite une compréhension globale de la nature, de l'emplacement, de la position et des résultats non conformes d'un objectif (par exemple, le courrier va dans la boîte, mais il y a un trou au fond et il tombe dans un buisson).
Dans le même temps, pour développer cet exemple de courrier, des objectifs de repli doivent être établis afin d'atteindre un résultat encore acceptable de manière automatisée sans surcharger les priorités principales de la fonction autonome du robot. Plus simplement :les robots autonomes doivent être capables d'improviser, mais planifier cette improvisation demande beaucoup de travail.
Comme Mark Twain l'a dit un jour :« Il me faut généralement plus de trois semaines pour préparer un bon discours impromptu. Ce n'est pas simplement un mot simple, mais en fait très instructif sur la façon dont les humains fonctionnent. Bien que nous soyons souvent concentrés sur les tâches à accomplir, nous avons un ensemble sophistiqué d'habitudes inconscientes avec des talents supplémentaires comme la « proprioception », qui ne sont pas bien reconnus.
Bien que ce soient des compétences parfaites pour un robot qui devra tout faire, de se balancer des arbres à chasser dans la savane et peut-être inventer la roue et tirer un peu plus tard. Il a fallu des millions d'années pour développer ces capacités, alors ne soyez pas surpris que faire fonctionner un robot de manière autonome puisse prendre plus d'un après-midi.
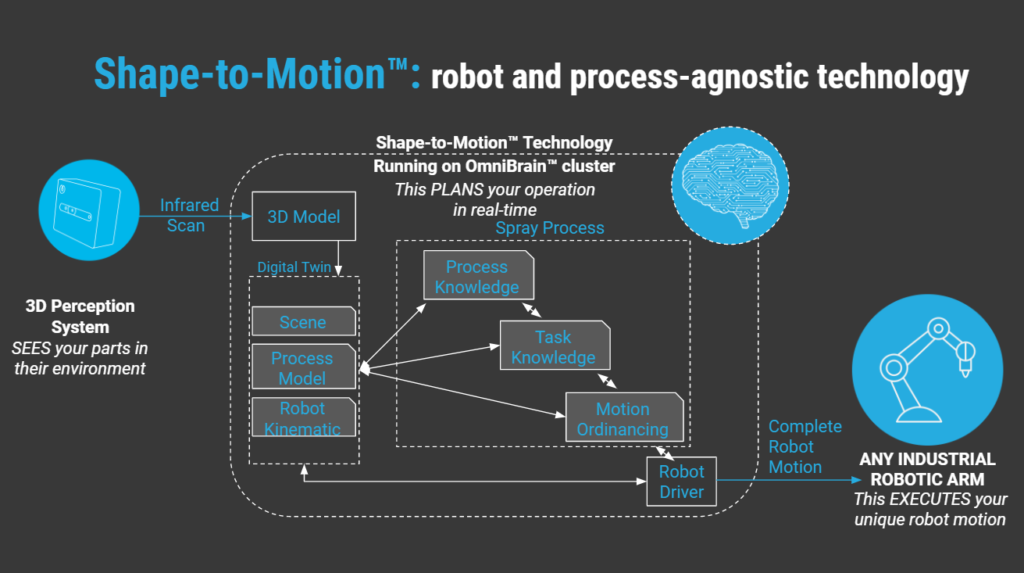
Alors, dans ce contexte, quelle est la réponse pour les robots ? Eh bien, un peu de la même manière que les humains visualisent leurs actions avant de les faire, générant des simulations ou des jumeaux numériques d'une fonction de robot autonome et l'utilisant pour injecter à la fois les attentes du modèle de processus (comme où se trouve habituellement une boîte aux lettres ou à quoi elle ressemble) est le le plus grand pas que vous puissiez faire pour créer un robot autonome utile.
Exécution du plan
Une fois que vous disposez d'un modèle de processus, de suffisamment de simulations et de mécanismes de détection correctement calibrés, l'exécution est simplement une question d'observation et d'optimisation. Si le robot autonome que vous construisez répond à vos normes dès la sortie de la boîte, alors même pas besoin de le faire. La valeur fondamentale des robots est leur cohérence, et les robots industriels modernes existants sont extrêmement fiables. Ajout de couches de perception et d'intelligence pour les rendre réactifs à différentes parties et positions crée ce tout nouveau monde d'autonomie que nous cherchons tous à explorer
Quelle est la prochaine étape pour cette autonomie ? Simplifier la manière dont les applications sont construites, comme mentionné ci-dessus, mais également augmenter la gamme de capteurs, d'agencements de robots, de tâches, d'environnements et plus encore qui peuvent être exécutés. Ce qui est idiot, c'est que l'automatisation crée de la productivité, ce qui, en fin de compte, augmente la croissance, les revenus et la demande de main-d'œuvre. Considérer l'automatisation comme une menace pour la main-d'œuvre est la vraie menace , tout en apportant l'automatisation à un plus grand nombre d'espaces les travailleurs n'aiment pas rendra les emplois plus créatifs, innovants et amusants que jamais - si les gens ont même besoin de travailler. Profitez-en !

Omnirobotic fournit une technologie robotique autonome pour les processus de pulvérisation, permettant aux robots industriels de voir les pièces, de planifier leur propre programme de mouvement et d'exécuter des processus industriels critiques de revêtement et de finition. Voyez quel type de retour vous pouvez en tirer ici , ou découvrez comment vous pouvez bénéficier de systèmes de fabrication autonomes .
Robot industriel
- Comment les robots de pulvérisation améliorent la cohérence
- Comment les robots de peinture réduisent les retouches
- Livre blanc :Comment trouver le potentiel de votre robot
- Combien coûte l'automatisation robotique ?
- Centre de solutions virtuelles :Comment la simulation de robot aide-t-elle l'intégration de robot ?
- Matériaux pour construire un robot :une liste complète
- Guide ultime :Comment choisir un bon robot SCARA
- Comment réduire le temps de formation pour le soudage robotisé
- Comment démarrer avec la programmation du robot Yaskawa